 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeInternet of Fly Things For Post-Disaster Recovery Based on Multi-environment
May 08, 2021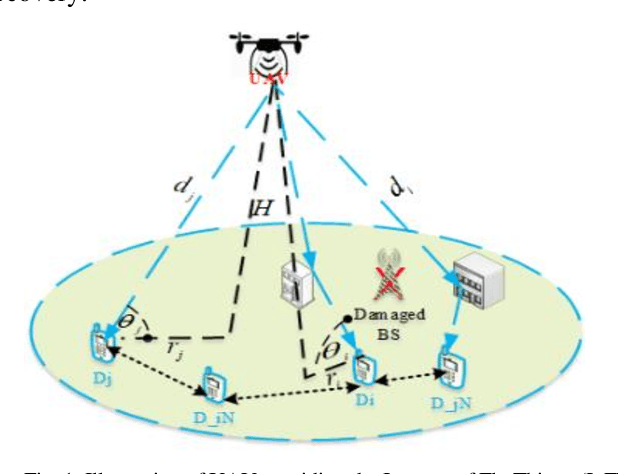
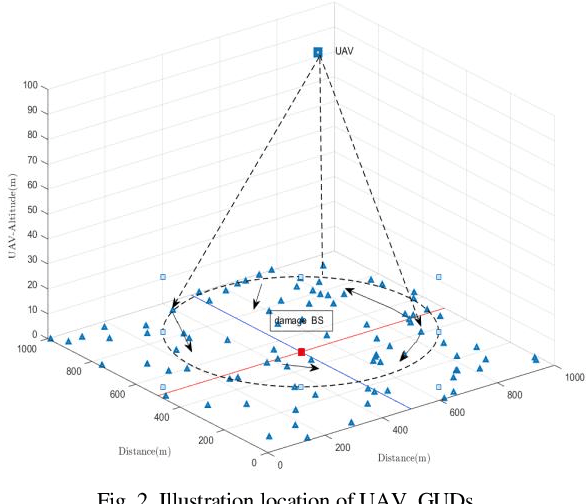
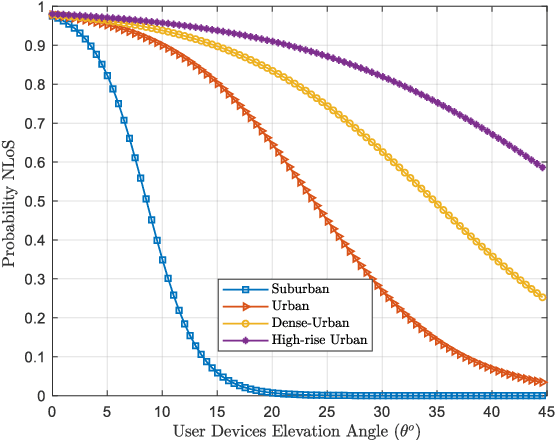
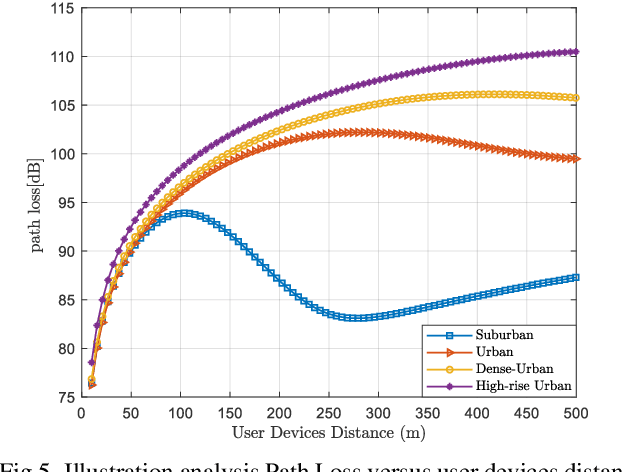
Natural disasters such as floods and earthquakes immensely impact the telecommunication network infrastructure, leading to the malfunctioning and interruption of wireless services. Consequently, the user devices under the disaster zone are unable to access the cellular base stations. Wireless coverage on an unmanned aerial vehicle (UAV) is considered for providing coverage service to ground user devices in disaster events. This work evaluated the efficient performance of wireless coverage services of UAVs to provide the internet to fly things to help recover the communications link in a natural disaster in multi environments. The results demonstrate the line of sight, nonline of sight, path loss, and coverage probability for the radio propagation environment scenario. Therefore, the path loss and coverage probability are affected by the user devices' elevation angle and distance in the multi-environment system. The user position's optimum user device distance and elevation angle are also investigated to improve the coverage probability, which could be especially useful for the UAV deployment design.
Real-time Autonomous Robot for Object Tracking using Vision System
Apr 26, 2021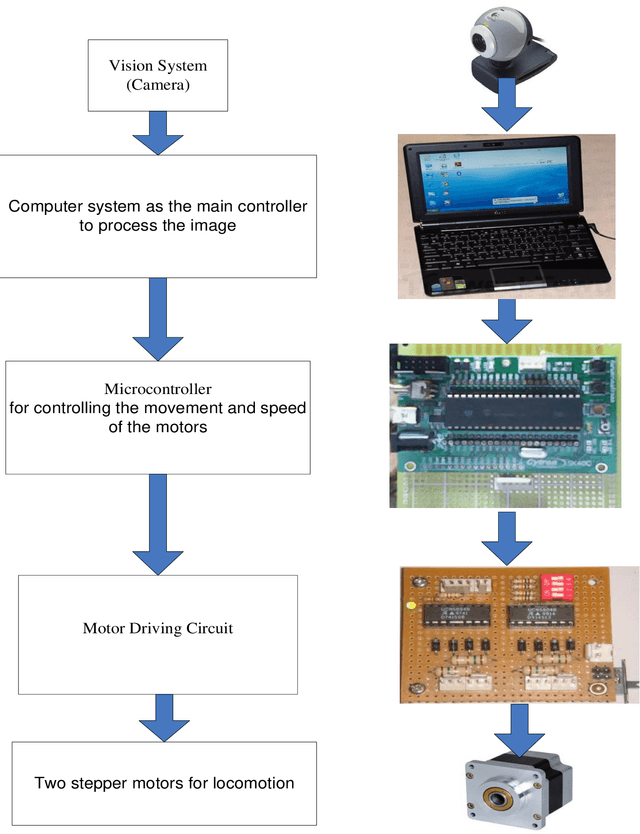

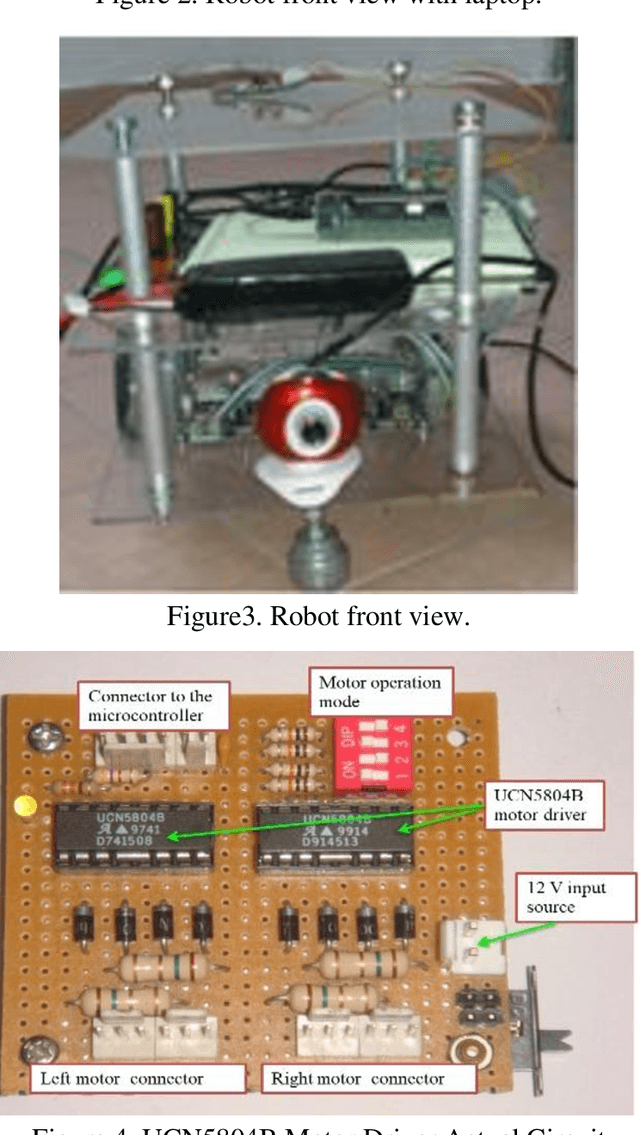

Researchers and robotic development groups have recently started paying special attention to autonomous mobile robot navigation in indoor environments using vision sensors. The required data is provided for robot navigation and object detection using a camera as a sensor. The aim of the project is to construct a mobile robot that has integrated vision system capability used by a webcam to locate, track and follow a moving object. To achieve this task, multiple image processing algorithms are implemented and processed in real-time. A mini-laptop was used for collecting the necessary data to be sent to a PIC microcontroller that turns the processes of data obtained to provide the robot's proper orientation. A vision system can be utilized in object recognition for robot control applications. The results demonstrate that the proposed mobile robot can be successfully operated through a webcam that detects the object and distinguishes a tennis ball based on its color and shape.
Unmanned Aerial Vehicle and Optimal Relay for Extending Coverage in Post-Disaster Scenarios
Apr 13, 2021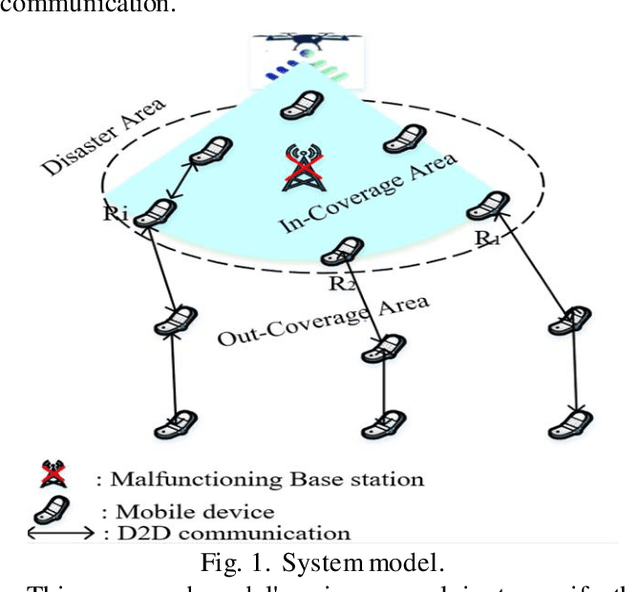
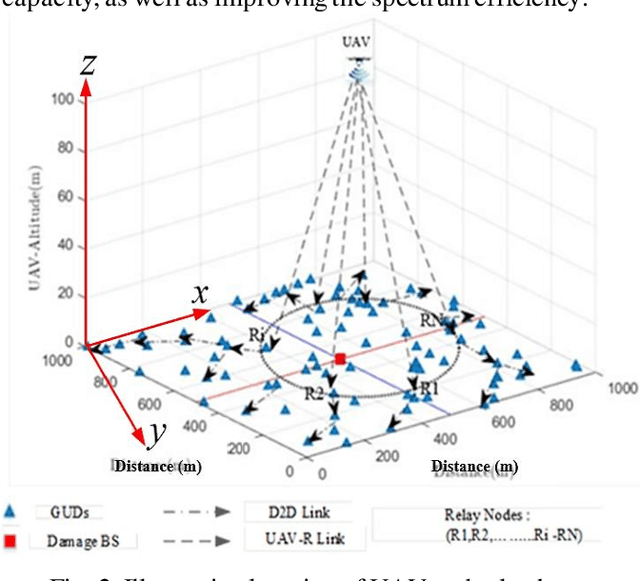
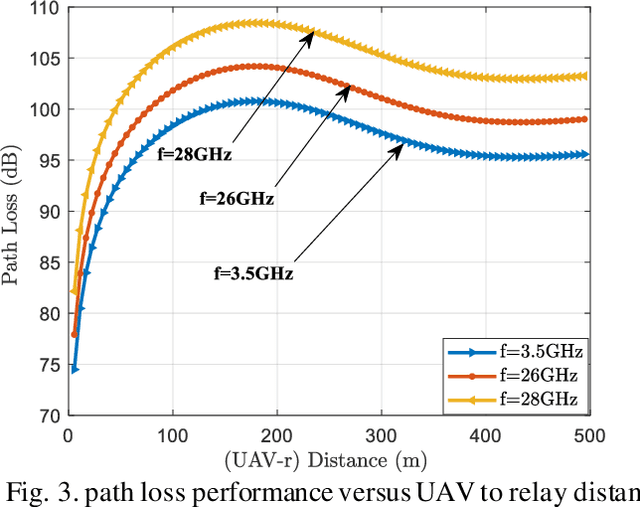
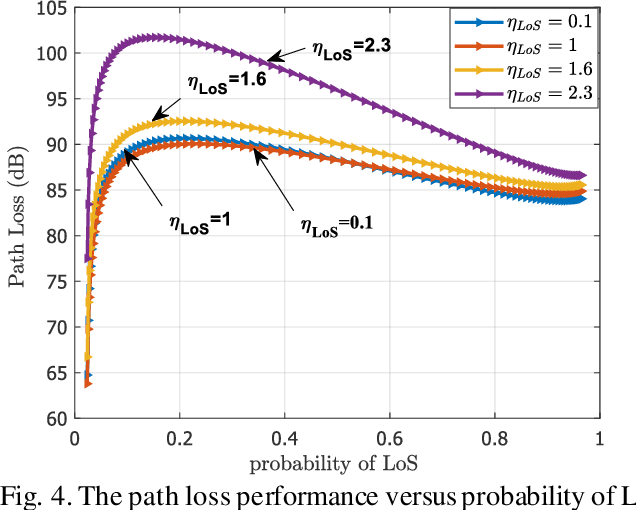
The malfunction or interruption of wireless coverage services has been shown to increase the mortality rate during natural disasters. Wireless coverage by an unmanned aerial vehicle (UAV) provides network coverage to ground user devices during and post-disaster events. The relay hops receive wireless coverage and can be forwarded to user devices that are out of coverage allowing reliable connectivity for large-scale user devices. This work evaluates the optimal relay hops performance to improve wireless coverage services and establish connectivity in post-disaster scenarios. The results demonstrate the UAV line of sights understanding to select an optimal relay for improving wireless coverage services. The path loss probability and system capacity were all affected by the user device distance and relay densities. The optimal relay hop distance and the UAV positions static are also investigated to improve coverage likelihood which could be especially useful for UAV deployment design. It is found that the dense relays node in UAV systems enhances the capacity coverage area and energy efficiency by decentralized connectivity through a multihop device to device wireless network.