 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeF10.7 Index Prediction: A Multiscale Decomposition Strategy with Wavelet Transform for Performance Optimization
Feb 24, 2026In this study, we construct Dataset A for training, validation, and testing, and Dataset B to evaluate generalization. We propose a novel F10.7 index forecasting method using wavelet decomposition, which feeds F10.7 together with its decomposed approximate and detail signals into the iTransformer model. We also incorporate the International Sunspot Number (ISN) and its wavelet-decomposed signals to assess their influence on prediction performance. Our optimal method is then compared with the latest method from S. Yan et al. (2025) and three operational models (SWPC, BGS, CLS). Additionally, we transfer our method to the PatchTST model used in H. Ye et al. (2024) and compare our method with theirs on Dataset B. Key findings include: (1) The wavelet-based combination methods overall outperform the baseline using only F10.7 index. The prediction performance improves as higher-level approximate and detail signals are incrementally added. The Combination 6 method integrating F10.7 with its first to fifth level approximate and detail signals outperforms methods using only approximate or detail signals. (2) Incorporating ISN and its wavelet-decomposed signals does not enhance prediction performance. (3) The Combination 6 method significantly surpasses S. Yan et al. (2025) and three operational models, with RMSE, MAE, and MAPE reduced by 18.22%, 15.09%, and 8.57%, respectively, against the former method. It also excels across four different conditions of solar activity. (4) Our method demonstrates superior generalization and prediction capability over the method of H. Ye et al. (2024) across all forecast horizons. To our knowledge, this is the first application of wavelet decomposition in F10.7 prediction, substantially improving forecast performance.
Energy-Efficient Tethered UAV Deployment in B5G for Smart Environments and Disaster Recovery
Jul 17, 2021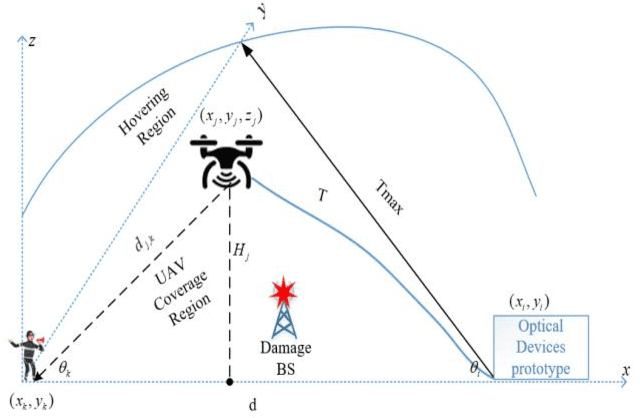
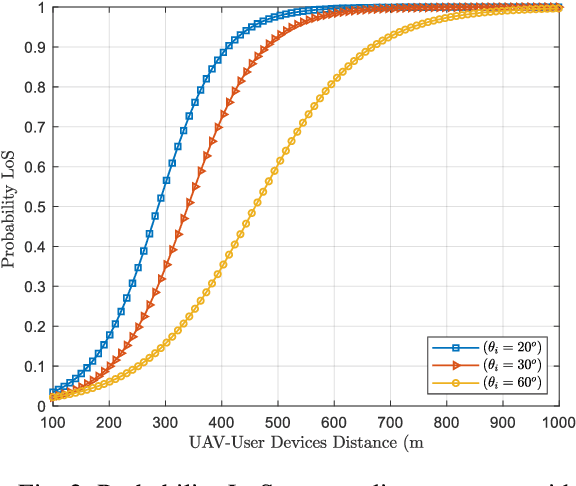
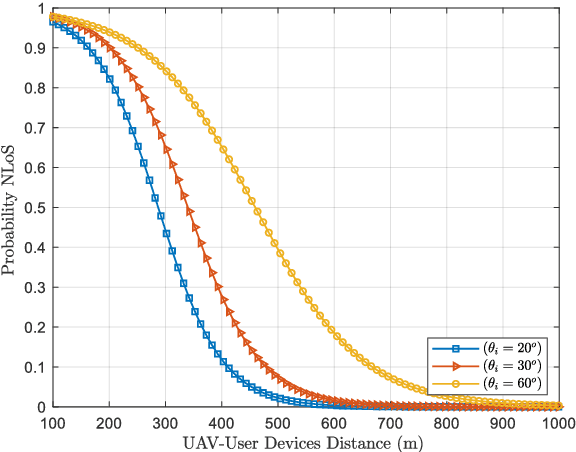
Due to Unmanned aerial vehicles (UAVs) limitations in processing power and battery lifetime. The tethered UAV (TUAV) offers an attractive approach to answer these shortcomings. Since a tethered connected to UAV is one potential energy solution to provide a stable power supply that connects to the ground would achieve impressive performances in smart environments and disaster recovery. The proposed solution is intended to provide stable energy and increase the coverage area of TUAV for smart environments and disaster recovery. This paper proposed that the tethered connected to UAV will provide the continuous supply and exchange the data with ground terminals. Besides the adjustable tether length, elevation angels act to increase the hovering region, leading to the scalability of coverage in many applications. Moreover, the power consumption and transmission the distance while achieving a trade-off between the hovering and coverage probabilities. The simulation results demonstrate efficient performance in terms of line-of-sight probability, path loss, and coverage probability for scalability coverage smart environments and disaster recovery scenarios. Furthermore, maximum coverage probability is achieved versus increased tethered length because of the gain and fly over a region of maximum tethered.
Unmanned Aerial Vehicle and Optimal Relay for Extending Coverage in Post-Disaster Scenarios
Apr 13, 2021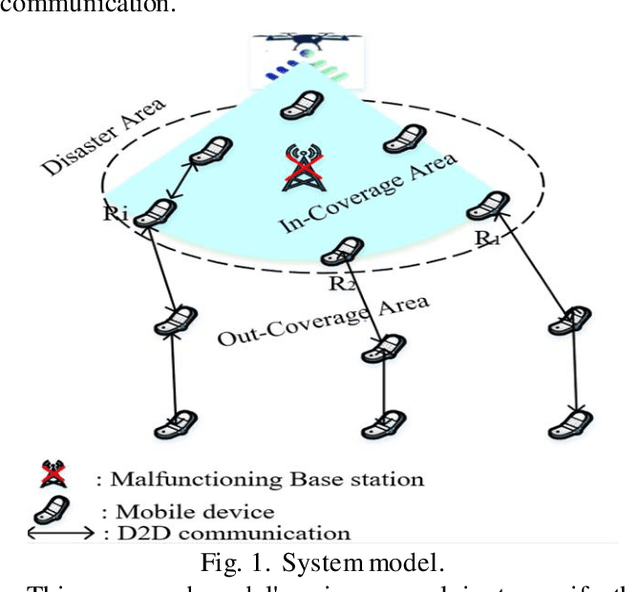
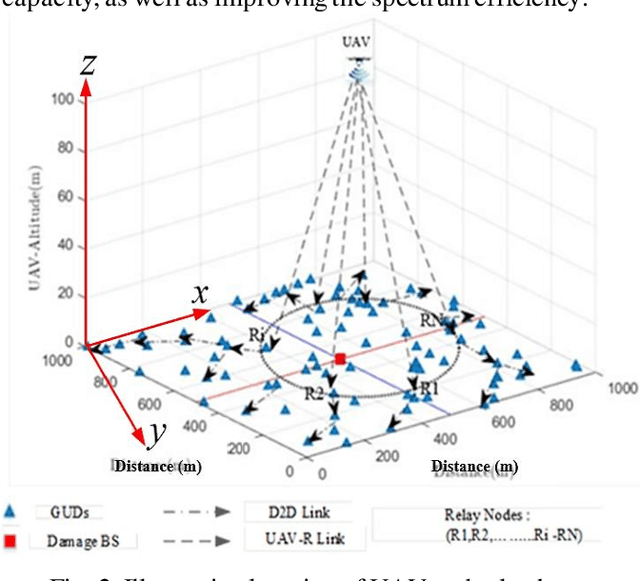
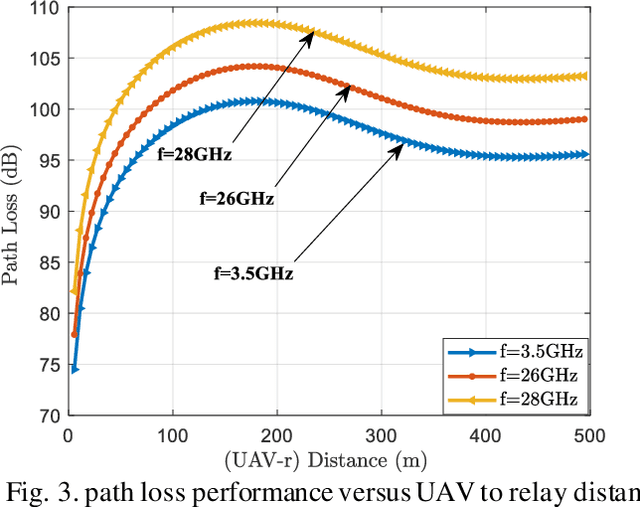
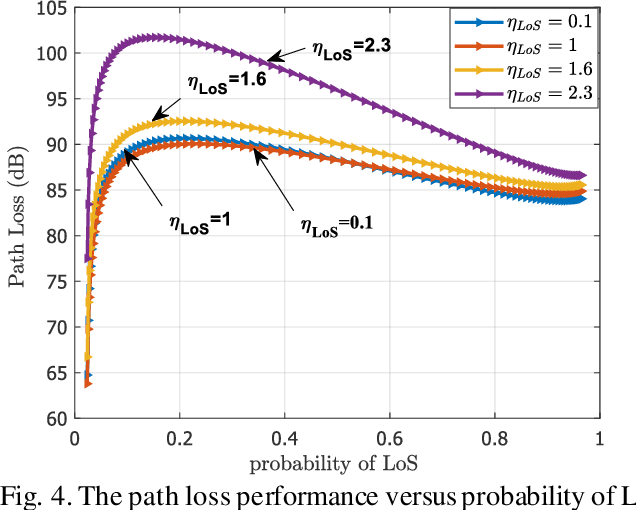
The malfunction or interruption of wireless coverage services has been shown to increase the mortality rate during natural disasters. Wireless coverage by an unmanned aerial vehicle (UAV) provides network coverage to ground user devices during and post-disaster events. The relay hops receive wireless coverage and can be forwarded to user devices that are out of coverage allowing reliable connectivity for large-scale user devices. This work evaluates the optimal relay hops performance to improve wireless coverage services and establish connectivity in post-disaster scenarios. The results demonstrate the UAV line of sights understanding to select an optimal relay for improving wireless coverage services. The path loss probability and system capacity were all affected by the user device distance and relay densities. The optimal relay hop distance and the UAV positions static are also investigated to improve coverage likelihood which could be especially useful for UAV deployment design. It is found that the dense relays node in UAV systems enhances the capacity coverage area and energy efficiency by decentralized connectivity through a multihop device to device wireless network.