 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePilot Contamination Elimination for Channel Estimation with Complete Knowledge of Large-Scale Fading in Downlink Massive MIMO Systems
Jun 25, 2021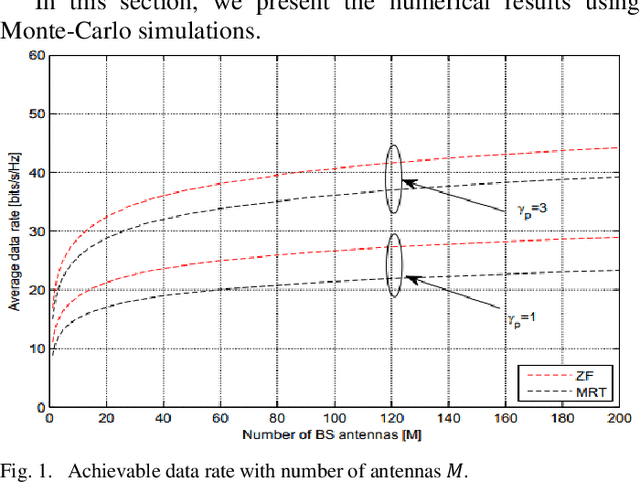
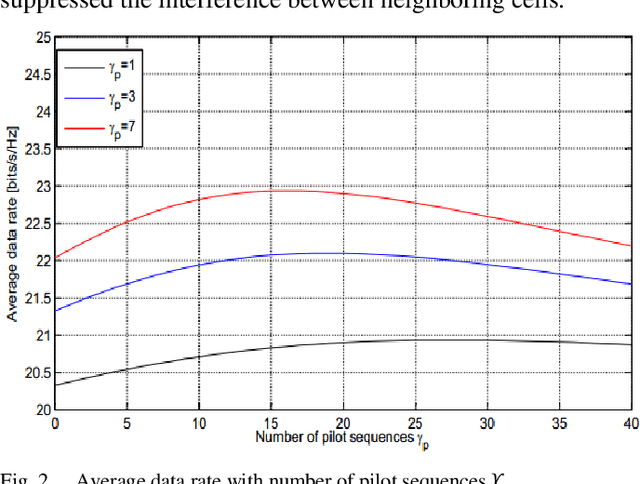
Massive multiple-input multiple-output is a very important technology for future fifth-generation systems. However, massive massive multiple input multiple output systems are still limited because of pilot contamination, impacting the data rate due to the non-orthogonality of pilot sequences transmitted by users in the same cell to the neighboring cells. We propose a channel estimation with complete knowledge of large-scale fading by using an orthogonal pilot reuse sequence to eliminate PC in edge users with poor channel quality based on the estimation of large-scale fading and performance analysis of maximum ratio transmission and zero forcing precoding methods. We derived the lower bounds on the achievable downlink DR and signal-to-interference noise ratio based on assigning PRS to a user grouping that mitigated this problem when the number of antenna elements approaches infinity The simulation results showed that a high DR can be achieved due to better channel estimation and reduced performance loss
Trade-off Energy and Spectral Efficiency in 5G Massive MIMO System
May 22, 2021


A massive multiple input multiple-output system is very important to optimize the trade-off energy efficiency and spectral efficiency in fifth-generation cellular networks. The challenges for the next generation depend on increasing the high data traffic in the wireless communication system for both EE and SE. In this paper, the trade off energy efficiency and spectral efficiency based on the first derivative of transmit antennas and transmit power in a downlink massive MIMO system has been investigated. The trade off EE-SE by using a multiobjective optimization problem to decrease transmit power has been analyzed. The EE and SE based on constraint maximum transmit power allocation and a number of antennas by computing the first derivative of transmit power to maximize the trade-off energy efficiency and spectral efficiency has been improved. From the simulation results, the optimum trade-off between EE and SE can be obtained based on the first derivative by selecting the optimal antennas with a low cost of transmit power. Therefore, based on an optimal optimization problem is flexible to make trade-offs between EE-SE for distinct preferences
Real-time Autonomous Robot for Object Tracking using Vision System
Apr 26, 2021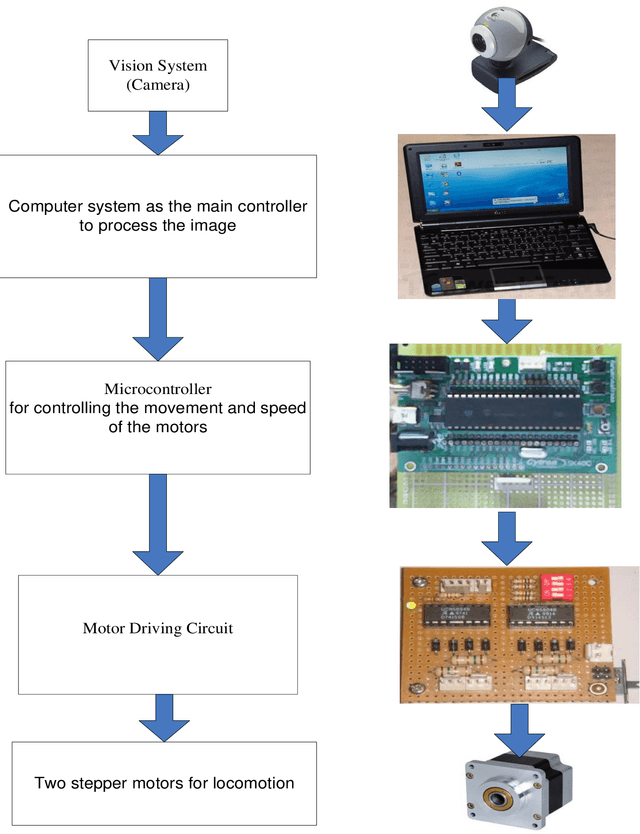

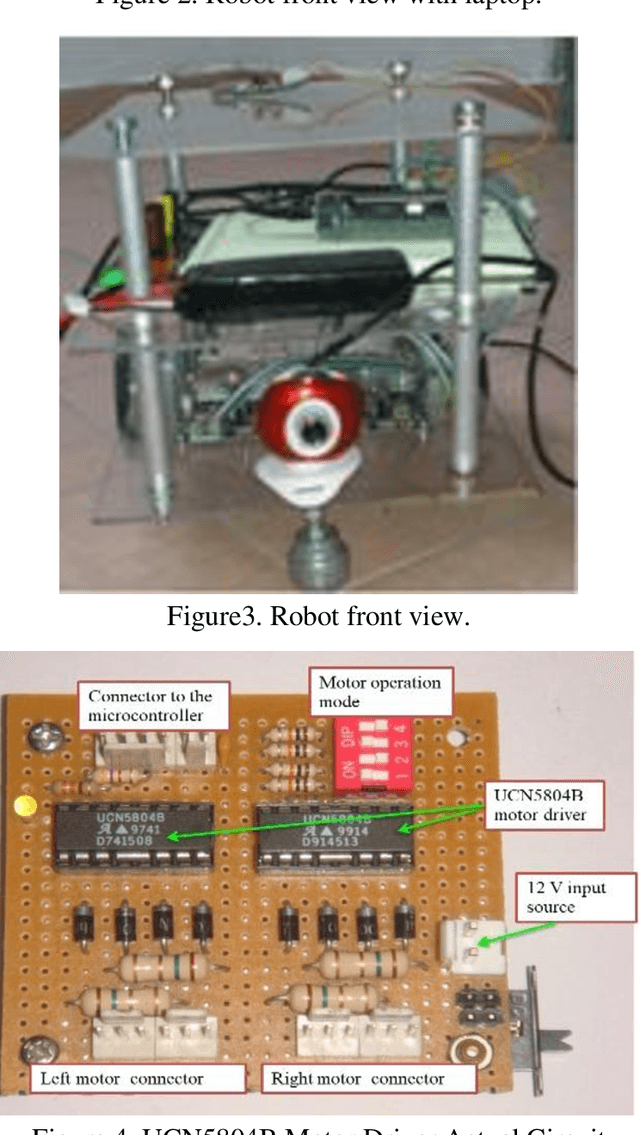

Researchers and robotic development groups have recently started paying special attention to autonomous mobile robot navigation in indoor environments using vision sensors. The required data is provided for robot navigation and object detection using a camera as a sensor. The aim of the project is to construct a mobile robot that has integrated vision system capability used by a webcam to locate, track and follow a moving object. To achieve this task, multiple image processing algorithms are implemented and processed in real-time. A mini-laptop was used for collecting the necessary data to be sent to a PIC microcontroller that turns the processes of data obtained to provide the robot's proper orientation. A vision system can be utilized in object recognition for robot control applications. The results demonstrate that the proposed mobile robot can be successfully operated through a webcam that detects the object and distinguishes a tennis ball based on its color and shape.