 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGeoFormer: A Vision and Sequence Transformer-based Approach for Greenhouse Gas Monitoring
Feb 11, 2024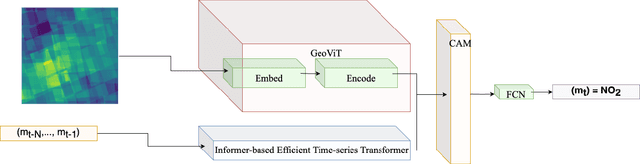
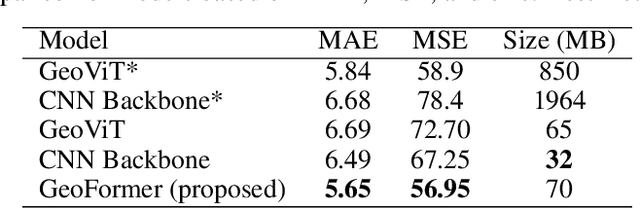
Air pollution represents a pivotal environmental challenge globally, playing a major role in climate change via greenhouse gas emissions and negatively affecting the health of billions. However predicting the spatial and temporal patterns of pollutants remains challenging. The scarcity of ground-based monitoring facilities and the dependency of air pollution modeling on comprehensive datasets, often inaccessible for numerous areas, complicate this issue. In this work, we introduce GeoFormer, a compact model that combines a vision transformer module with a highly efficient time-series transformer module to predict surface-level nitrogen dioxide (NO2) concentrations from Sentinel-5P satellite imagery. We train the proposed model to predict surface-level NO2 measurements using a dataset we constructed with Sentinel-5P images of ground-level monitoring stations, and their corresponding NO2 concentration readings. The proposed model attains high accuracy (MAE 5.65), demonstrating the efficacy of combining vision and time-series transformer architectures to harness satellite-derived data for enhanced GHG emission insights, proving instrumental in advancing climate change monitoring and emission regulation efforts globally.
GeoViT: A Versatile Vision Transformer Architecture for Geospatial Image Analysis
Nov 24, 2023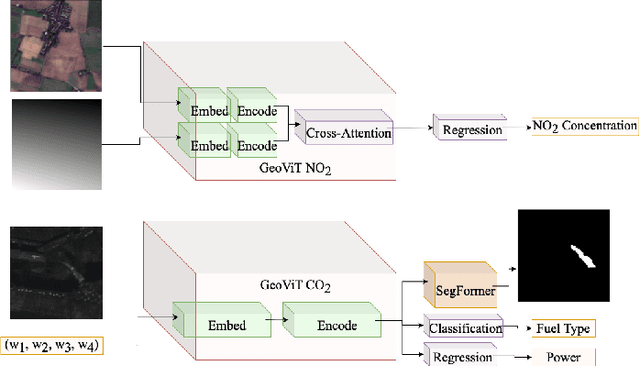
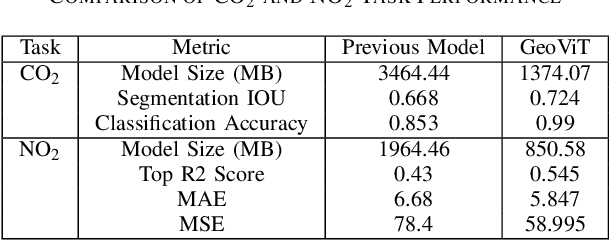
Greenhouse gases are pivotal drivers of climate change, necessitating precise quantification and source identification to foster mitigation strategies. We introduce GeoViT, a compact vision transformer model adept in processing satellite imagery for multimodal segmentation, classification, and regression tasks targeting CO2 and NO2 emissions. Leveraging GeoViT, we attain superior accuracy in estimating power generation rates, fuel type, plume coverage for CO2, and high-resolution NO2 concentration mapping, surpassing previous state-of-the-art models while significantly reducing model size. GeoViT demonstrates the efficacy of vision transformer architectures in harnessing satellite-derived data for enhanced GHG emission insights, proving instrumental in advancing climate change monitoring and emission regulation efforts globally.
Cooperative Multi-Agent Reinforcement Learning for Inventory Management
Apr 18, 2023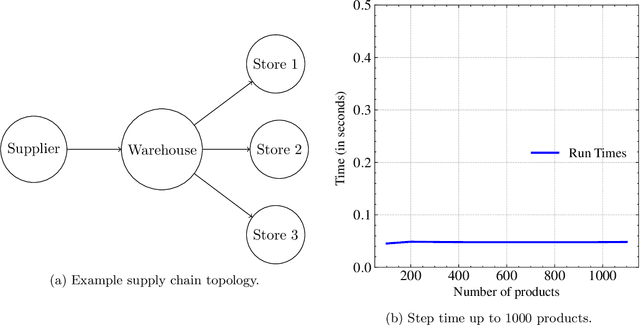
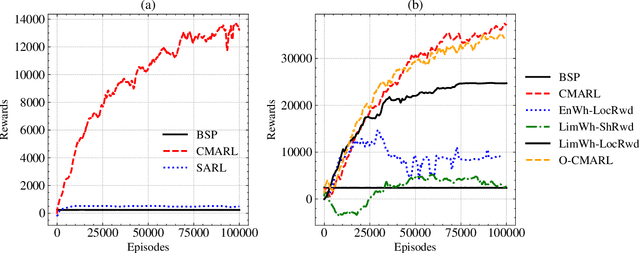
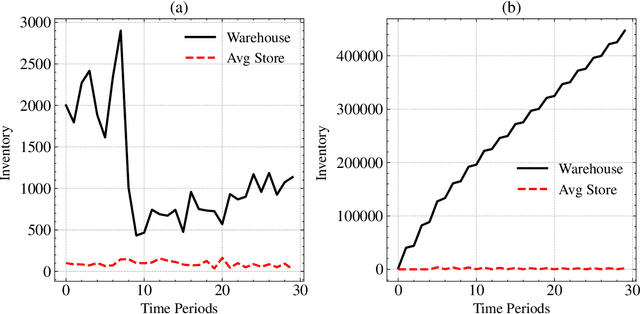
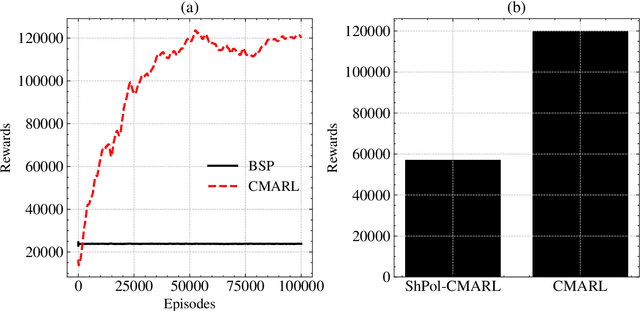
With Reinforcement Learning (RL) for inventory management (IM) being a nascent field of research, approaches tend to be limited to simple, linear environments with implementations that are minor modifications of off-the-shelf RL algorithms. Scaling these simplistic environments to a real-world supply chain comes with a few challenges such as: minimizing the computational requirements of the environment, specifying agent configurations that are representative of dynamics at real world stores and warehouses, and specifying a reward framework that encourages desirable behavior across the whole supply chain. In this work, we present a system with a custom GPU-parallelized environment that consists of one warehouse and multiple stores, a novel architecture for agent-environment dynamics incorporating enhanced state and action spaces, and a shared reward specification that seeks to optimize for a large retailer's supply chain needs. Each vertex in the supply chain graph is an independent agent that, based on its own inventory, able to place replenishment orders to the vertex upstream. The warehouse agent, aside from placing orders from the supplier, has the special property of also being able to constrain replenishment to stores downstream, which results in it learning an additional allocation sub-policy. We achieve a system that outperforms standard inventory control policies such as a base-stock policy and other RL-based specifications for 1 product, and lay out a future direction of work for multiple products.