 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTopoMaskV2: Enhanced Instance-Mask-Based Formulation for the Road Topology Problem
Sep 17, 2024



Recently, the centerline has become a popular representation of lanes due to its advantages in solving the road topology problem. To enhance centerline prediction, we have developed a new approach called TopoMask. Unlike previous methods that rely on keypoints or parametric methods, TopoMask utilizes an instance-mask-based formulation coupled with a masked-attention-based transformer architecture. We introduce a quad-direction label representation to enrich the mask instances with flow information and design a corresponding post-processing technique for mask-to-centerline conversion. Additionally, we demonstrate that the instance-mask formulation provides complementary information to parametric Bezier regressions, and fusing both outputs leads to improved detection and topology performance. Moreover, we analyze the shortcomings of the pillar assumption in the Lift Splat technique and adapt a multi-height bin configuration. Experimental results show that TopoMask achieves state-of-the-art performance in the OpenLane-V2 dataset, increasing from 44.1 to 49.4 for Subset-A and 44.7 to 51.8 for Subset-B in the V1.1 OLS baseline.
TopoMask: Instance-Mask-Based Formulation for the Road Topology Problem via Transformer-Based Architecture
Jun 08, 2023



Driving scene understanding task involves detecting static elements such as lanes, traffic signs, and traffic lights, and their relationships with each other. To facilitate the development of comprehensive scene understanding solutions using multiple camera views, a new dataset called Road Genome (OpenLane-V2) has been released. This dataset allows for the exploration of complex road connections and situations where lane markings may be absent. Instead of using traditional lane markings, the lanes in this dataset are represented by centerlines, which offer a more suitable representation of lanes and their connections. In this study, we have introduced a new approach called TopoMask for predicting centerlines in road topology. Unlike existing approaches in the literature that rely on keypoints or parametric methods, TopoMask utilizes an instance-mask based formulation with a transformer-based architecture and, in order to enrich the mask instances with flow information, a direction label representation is proposed. TopoMask have ranked 4th in the OpenLane-V2 Score (OLS) and ranked 2nd in the F1 score of centerline prediction in OpenLane Topology Challenge 2023. In comparison to the current state-of-the-art method, TopoNet, the proposed method has achieved similar performance in Frechet-based lane detection and outperformed TopoNet in Chamfer-based lane detection without utilizing its scene graph neural network.
Late Temporal Modeling in 3D CNN Architectures with BERT for Action Recognition
Aug 19, 2020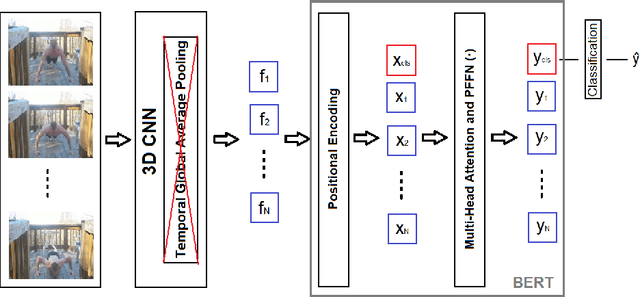



In this work, we combine 3D convolution with late temporal modeling for action recognition. For this aim, we replace the conventional Temporal Global Average Pooling (TGAP) layer at the end of 3D convolutional architecture with the Bidirectional Encoder Representations from Transformers (BERT) layer in order to better utilize the temporal information with BERT's attention mechanism. We show that this replacement improves the performances of many popular 3D convolution architectures for action recognition, including ResNeXt, I3D, SlowFast and R(2+1)D. Moreover, we provide the-state-of-the-art results on both HMDB51 and UCF101 datasets with 85.10% and 98.69% top-1 accuracy, respectively. The code is publicly available.