 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMultipath-based SLAM with Cooperation and Map Fusion
May 03, 2024Multipath-based simultaneous localization and mapping (MP-SLAM) is a promising approach in wireless networks for obtaining position information of transmitters and receivers as well as information on the propagation environment. MP-SLAM models specular reflections of radio frequency (RF) signals at flat surfaces as virtual anchors (VAs), the mirror images of base stations (BSs). Conventional methods for MP-SLAM consider a single mobile terminal (MT) which has to be localized. The availability of additional MTs paves the way for utilizing additional information in the scenario. Specifically enabling MTs to exchange information allows for data fusion over different observations of VAs made by different MTs. Furthermore, cooperative localization becomes possible in addition to multipath-based localization. Utilizing this additional information enables more robust mapping and higher localization accuracy.
MIMO Multipath-based SLAM for Non-Ideal Reflective Surfaces
Apr 22, 2024



Multipath-based simultaneous localization and mapping (MP-SLAM) is a well established approach to obtain position information of transmitters and receivers as well as information regarding the propagation environments in future multiple input multiple output (MIMO) communication systems. Conventional methods for MP-SLAM consider specular reflections of the radio signals occurring at smooth, flat surfaces, which are modeled by virtual anchors (VAs) that are mirror images of the physical anchors (PAs), with each VA generating a single multipath component (MPC). However, non-ideal reflective surfaces (such as walls covered by shelves or cupboards) cause dispersion effects that violate the VA model and lead to multiple MPCs that are associated to a single VA. In this paper, we introduce a Bayesian particle-based sum-product algorithm (SPA) for MP-SLAM in MIMO communications systems. Our method considers non-ideal reflective surfaces by jointly estimating the parameters of individual dispersion models for each detected surface in delay and angle domain leveraging multiple-measurement-to-feature data association. We demonstrate that the proposed SLAM method can robustly and jointly estimate the positions and dispersion extents of ideal and non-ideal reflective surfaces using numerical simulation.
Multipath-based SLAM for Non-Ideal Reflective Surfaces Exploiting Multiple-Measurement Data Association
Apr 16, 2023Multipath-based simultaneous localization and mapping (SLAM) is a promising approach to obtain position information of transmitters and receivers as well as information regarding the propagation environments in future mobile communication systems. Usually, specular reflections of the radio signals occurring at flat surfaces are modeled by virtual anchors (VAs) that are mirror images of the physical anchors (PAs). In existing methods for multipath-based SLAM, each VA is assumed to generate only a single measurement. However, due to imperfections of the measurement equipment such as non-calibrated antennas or model mismatch due to roughness of the reflective surfaces, there are potentially multiple multipath components (MPCs) that are associated to one single VA. In this paper, we introduce a Bayesian particle-based sum-product algorithm (SPA) for multipath-based SLAM that can cope with multiple-measurements being associated to a single VA. Furthermore, we introduce a novel statistical measurement model that is strongly related to the radio signal. It introduces additional dispersion parameters into the likelihood function to capture additional MPCs-related measurements. We demonstrate that the proposed SLAM method can robustly fuse multiple measurements per VA based on numerical simulations.
Message Passing-Based 9-D Cooperative Localization and Navigation with Embedded Particle Flow
Jan 03, 2023

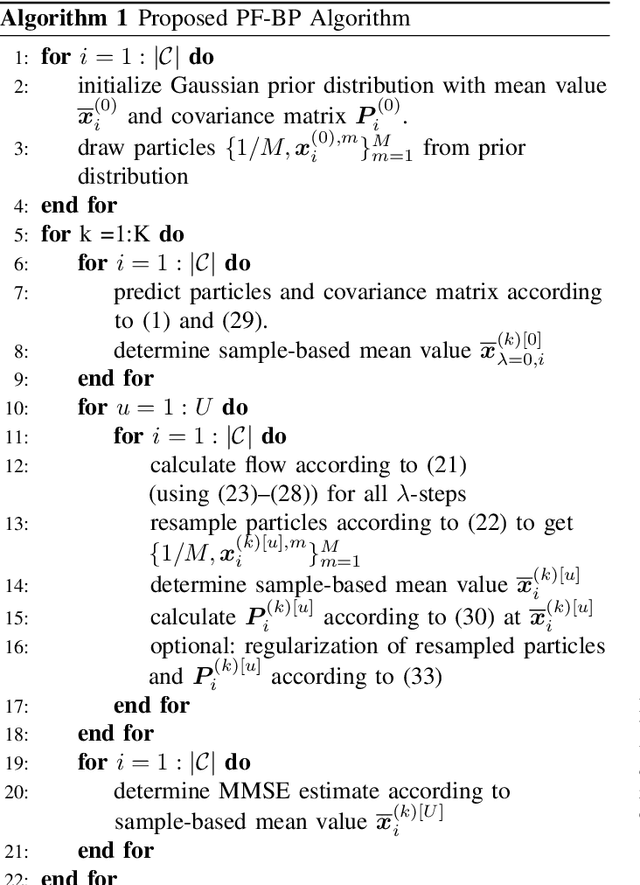

Cooperative localization (CL) is an important technology for innovative services such as location-aware communication networks, modern convenience, and public safety. We consider wireless networks with mobile agents that aim to localize themselves by performing pairwise measurements amongst agents and exchanging their location information. Belief propagation (BP) is a state-of-the-art Bayesian method for CL. In CL, particle-based implementations of BP often are employed that can cope with non-linear measurement models and state dynamics. However, particle-based BP algorithms are known to suffer from particle degeneracy in large and dense networks of mobile agents with high-dimensional states. This paper derives the messages of BP for CL by means of particle flow, leading to the development of a distributed particle-based message-passing algorithm which avoids particle degeneracy. Our combined particle flow-based BP approach allows the calculation of highly accurate proposal distributions for agent states with a minimal number of particles. It outperforms conventional particle-based BP algorithms in terms of accuracy and runtime. Furthermore, we compare the proposed method to a centralized particle flow-based implementation, known as the exact Daum-Huang filter, and to sigma point BP in terms of position accuracy, runtime, and memory requirement versus the network size. We further contrast all methods to the theoretical performance limit provided by the posterior Cram\'er-Rao lower bound (PCRLB). Based on three different scenarios, we demonstrate the superiority of the proposed method.
RSS-based Cooperative Localization and Orientation Estimation Exploiting Directive Antenna Patterns
Mar 24, 2021



In this paper, we propose a factor-graph-based cooperative positioning algorithm that uses RSS radio measurements and accounts for the directivity of the antennas. This is achieved by modeling the directivity with a parametric antenna pattern and jointly estimating position and orientation of the agents. We propose two different approaches whereas the first one uses a continuous representation of the orientation state and the second one a discrete representation. We validate our proposed methods with simulations and measurements in a static sensor network with more than 900 agents in an indoor environment and show that the positioning accuracy can be improved significantly by considering the influence of orientations.