 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOn the Robustness of Active Learning
Jun 18, 2020
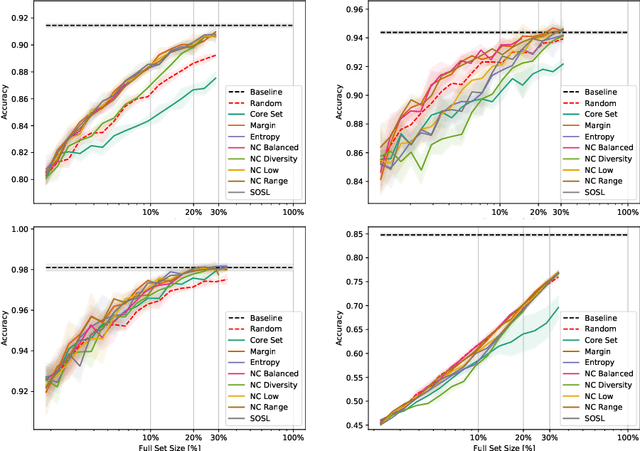
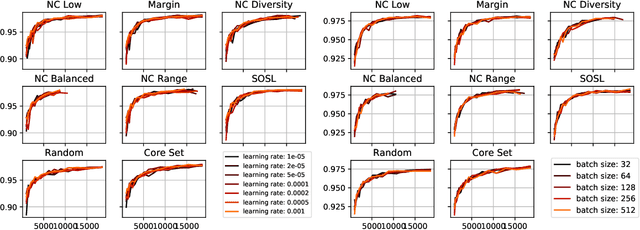
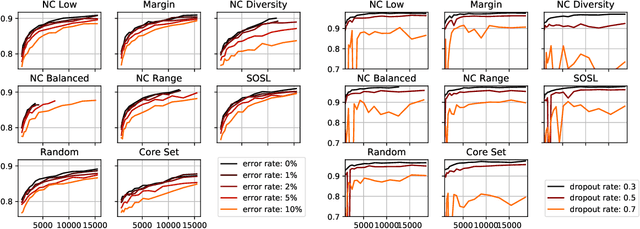
Active Learning is concerned with the question of how to identify the most useful samples for a Machine Learning algorithm to be trained with. When applied correctly, it can be a very powerful tool to counteract the immense data requirements of Artificial Neural Networks. However, we find that it is often applied with not enough care and domain knowledge. As a consequence, unrealistic hopes are raised and transfer of the experimental results from one dataset to another becomes unnecessarily hard. In this work we analyse the robustness of different Active Learning methods with respect to classifier capacity, exchangeability and type, as well as hyperparameters and falsely labelled data. Experiments reveal possible biases towards the architecture used for sample selection, resulting in suboptimal performance for other classifiers. We further propose the new "Sum of Squared Logits" method based on the Simpson diversity index and investigate the effect of using the confusion matrix for balancing in sample selection.
* 11 pages, 6 figures, 1 table; as published in the proceedings of the 5th Global Conference on Artificial Intelligence (GCAI), EPiC Series in Computing, Volume 65, pages 152-162, https://doi.org/10.29007/thws, 2019
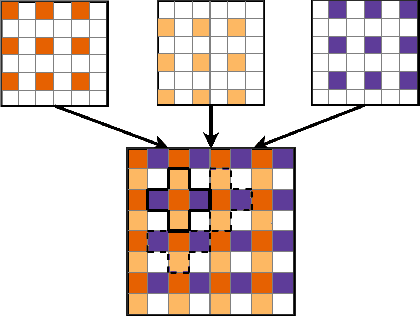
Fast Object Classification and Meaningful Data Representation of Segmented Lidar Instances
Jun 17, 2020


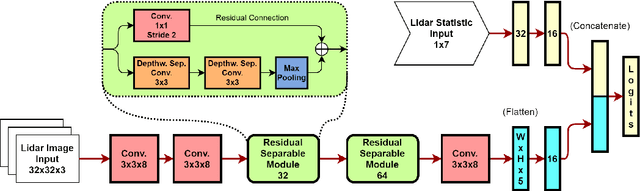
Object detection algorithms for Lidar data have seen numerous publications in recent years, reporting good results on dataset benchmarks oriented towards automotive requirements. Nevertheless, many of these are not deployable to embedded vehicle systems, as they require immense computational power to be executed close to real time. In this work, we propose a way to facilitate real-time Lidar object classification on CPU. We show how our approach uses segmented object instances to extract important features, enabling a computationally efficient batch-wise classification. For this, we introduce a data representation which translates three-dimensional information into small image patches, using decomposed normal vector images. We couple this with dedicated object statistics to handle edge cases. We apply our method on the tasks of object detection and semantic segmentation, as well as the relatively new challenge of panoptic segmentation. Through evaluation, we show, that our algorithm is capable of producing good results on public data, while running in real time on CPU without using specific optimisation.
Fast Lidar Clustering by Density and Connectivity
Mar 01, 2020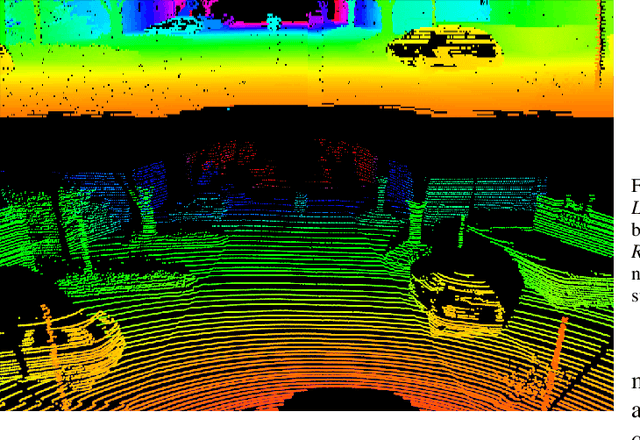


Lidar sensors are widely used in various applications, ranging from scientific fields over industrial use to integration in consumer products. With an ever growing number of different driver assistance systems, they have been introduced to automotive series production in recent years and are considered an important building block for the practical realisation of autonomous driving. However, due to the potentially large amount of Lidar points per scan, tailored algorithms are required to identify objects (e.g. pedestrians or vehicles) with high precision in a very short time. In this work, we propose an algorithmic approach for real-time instance segmentation of Lidar sensor data. We show how our method leverages the properties of the Euclidean distance to retain three-dimensional measurement information, while being narrowed down to a two-dimensional representation for fast computation. We further introduce what we call skip connections, to make our approach robust against over-segmentation and improve assignment in cases of partial occlusion. Through detailed evaluation on public data and comparison with established methods, we show how these aspects enable state-of-the-art performance and runtime on a single CPU core.
Fast and Reliable Architecture Selection for Convolutional Neural Networks
May 06, 2019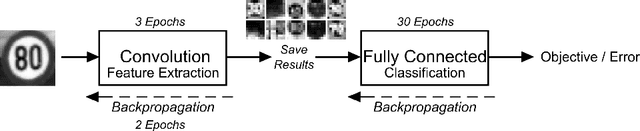


The performance of a Convolutional Neural Network (CNN) depends on its hyperparameters, like the number of layers, kernel sizes, or the learning rate for example. Especially in smaller networks and applications with limited computational resources, optimisation is key. We present a fast and efficient approach for CNN architecture selection. Taking into account time consumption, precision and robustness, we develop a heuristic to quickly and reliably assess a network's performance. In combination with Bayesian optimisation (BO), to effectively cover the vast parameter space, our contribution offers a plain and powerful architecture search for this machine learning technique.
* As published in the proceedings of the 27th European Symposium on Artificial Neural Networks, Computational Intelligence and Machine Learning (ESANN), pages 179-184, Bruges 2019. 6 pages, 2 figures, 1 table