 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCloud Kitchen: Using Planning-based Composite AI to Optimize Food Delivery Process
Feb 16, 2024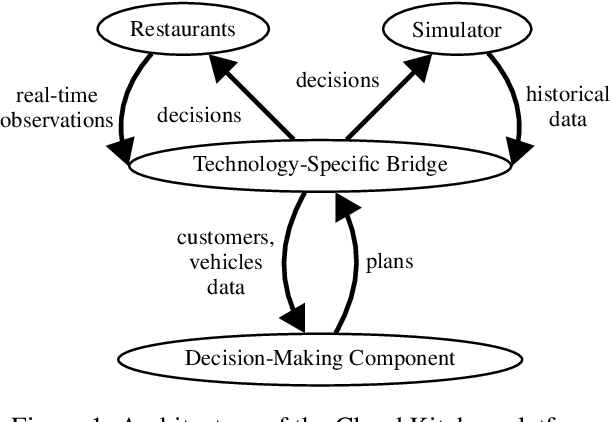
The global food delivery market provides many opportunities for AI-based services that can improve the efficiency of feeding the world. This paper presents the Cloud Kitchen platform as a decision-making tool for restaurants with food delivery and a simulator to evaluate the impact of the decisions. The platform consists of a Technology-Specific Bridge (TSB) that provides an interface for communicating with restaurants or the simulator. TSB uses a PDDL model to represent decisions embedded in the Unified Planning Framework (UPF). Decision-making, which concerns allocating customers' orders to vehicles and deciding in which order the customers will be served (for each vehicle), is done via a Vehicle Routing Problem with Time Windows (VRPTW), an efficient tool for this problem. We show that decisions made by our platform can improve customer satisfaction by reducing the number of delayed deliveries using a real-world historical dataset.
Learning Planning Action Models from State Traces
Feb 16, 2024

Previous STRIPS domain model acquisition approaches that learn from state traces start with the names and parameters of the actions to be learned. Therefore their only task is to deduce the preconditions and effects of the given actions. In this work, we explore learning in situations when the parameters of learned actions are not provided. We define two levels of trace quality based on which information is provided and present an algorithm for each. In one level (L1), the states in the traces are labeled with action names, so we can deduce the number and names of the actions, but we still need to work out the number and types of parameters. In the other level (L2), the states are additionally labeled with objects that constitute the parameters of the corresponding grounded actions. Here we still need to deduce the types of the parameters in the learned actions. We experimentally evaluate the proposed algorithms and compare them with the state-of-the-art learning tool FAMA on a large collection of IPC benchmarks. The evaluation shows that our new algorithms are faster, can handle larger inputs and provide better results in terms of learning action models more similar to reference models.
Enhancing Temporal Planning Domains by Sequential Macro-actions (Extended Version)
Jul 22, 2023Temporal planning is an extension of classical planning involving concurrent execution of actions and alignment with temporal constraints. Durative actions along with invariants allow for modeling domains in which multiple agents operate in parallel on shared resources. Hence, it is often important to avoid resource conflicts, where temporal constraints establish the consistency of concurrent actions and events. Unfortunately, the performance of temporal planning engines tends to sharply deteriorate when the number of agents and objects in a domain gets large. A possible remedy is to use macro-actions that are well-studied in the context of classical planning. In temporal planning settings, however, introducing macro-actions is significantly more challenging when the concurrent execution of actions and shared use of resources, provided the compliance to temporal constraints, should not be suppressed entirely. Our work contributes a general concept of sequential temporal macro-actions that guarantees the applicability of obtained plans, i.e., the sequence of original actions encapsulated by a macro-action is always executable. We apply our approach to several temporal planners and domains, stemming from the International Planning Competition and RoboCup Logistics League. Our experiments yield improvements in terms of obtained satisficing plans as well as plan quality for the majority of tested planners and domains.
Determining ActionReversibility in STRIPS Using Answer Set and Epistemic Logic Programming
Aug 11, 2021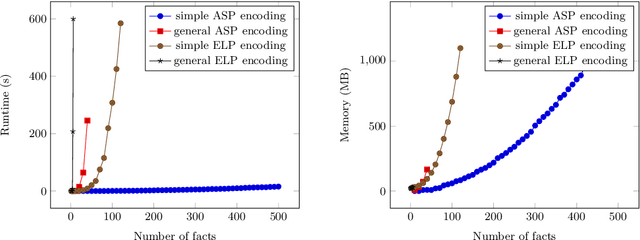
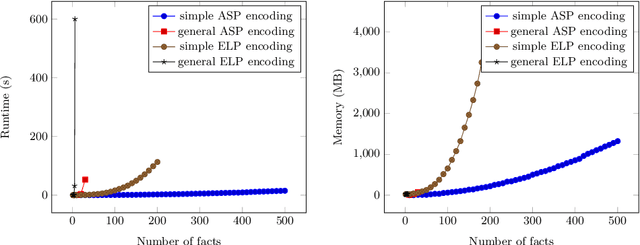
In the context of planning and reasoning about actions and change, we call an action reversible when its effects can be reverted by applying other actions, returning to the original state. Renewed interest in this area has led to several results in the context of the PDDL language, widely used for describing planning tasks. In this paper, we propose several solutions to the computational problem of deciding the reversibility of an action. In particular, we leverage an existing translation from PDDL to Answer Set Programming (ASP), and then use several different encodings to tackle the problem of action reversibility for the STRIPS fragment of PDDL. For these, we use ASP, as well as Epistemic Logic Programming (ELP), an extension of ASP with epistemic operators, and compare and contrast their strengths and weaknesses. Under consideration for acceptance in TPLP.