 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeInteractive Open-Ended Object, Affordance and Grasp Learning for Robotic Manipulation
Apr 04, 2019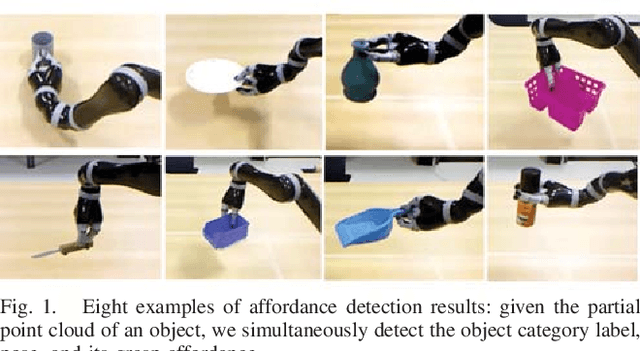
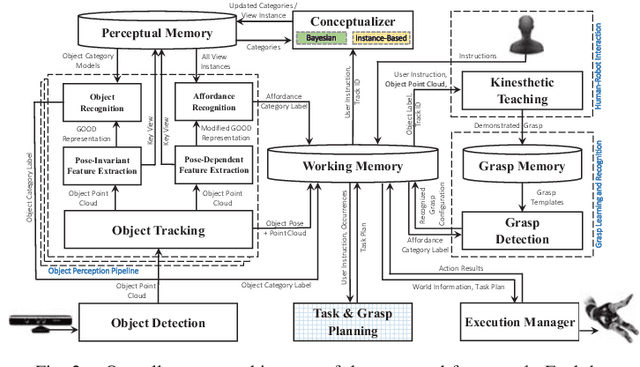
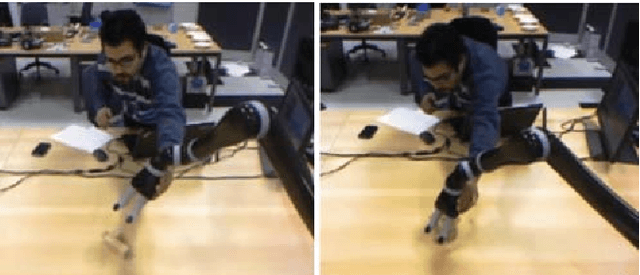
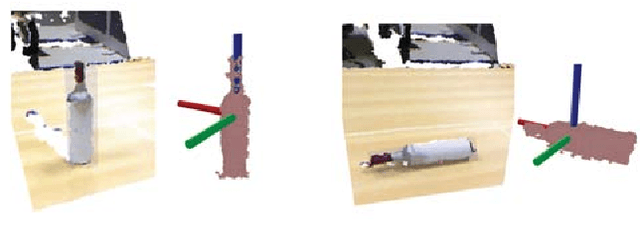
Service robots are expected to autonomously and efficiently work in human-centric environments. For this type of robots, object perception and manipulation are challenging tasks due to need for accurate and real-time response. This paper presents an interactive open-ended learning approach to recognize multiple objects and their grasp affordances concurrently. This is an important contribution in the field of service robots since no matter how extensive the training data used for batch learning, a robot might always be confronted with an unknown object when operating in human-centric environments. The paper describes the system architecture and the learning and recognition capabilities. Grasp learning associates grasp configurations (i.e., end-effector positions and orientations) to grasp affordance categories. The grasp affordance category and the grasp configuration are taught through verbal and kinesthetic teaching, respectively. A Bayesian approach is adopted for learning and recognition of object categories and an instance-based approach is used for learning and recognition of affordance categories. An extensive set of experiments has been performed to assess the performance of the proposed approach regarding recognition accuracy, scalability and grasp success rate on challenging datasets and real-world scenarios.
Computing the Scope of Applicability for Acquired Task Knowledge in Experience-Based Planning Domains
Mar 13, 2019


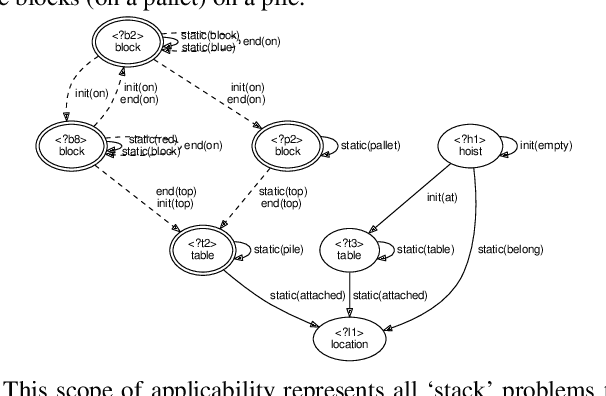
Experience-based planning domains have been proposed to improve problem solving by learning from experience. They rely on acquiring and using task knowledge, i.e., activity schemata, for generating solutions to problem instances in a class of tasks. Using Three-Valued Logic Analysis (TVLA), we extend previous work to generate a set of conditions that determine the scope of applicability of an activity schema. The inferred scope is a bounded representation of a set of problems of potentially unbounded size, in the form of a 3-valued logical structure, which is used to automatically find an applicable activity schema for solving task problems. We validate this work in two classical planning domains.
Learning Task Knowledge and its Scope of Applicability in Experience-Based Planning Domains
Mar 05, 2019



Experience-based planning domains (EBPDs) have been recently proposed to improve problem solving by learning from experience. EBPDs provide important concepts for long-term learning and planning in robotics. They rely on acquiring and using task knowledge, i.e., activity schemata, for generating concrete solutions to problem instances in a class of tasks. Using Three-Valued Logic Analysis (TVLA), we extend previous work to generate a set of conditions as the scope of applicability for an activity schema. The inferred scope is a bounded representation of a set of problems of potentially unbounded size, in the form of a 3-valued logical structure, which allows an EBPD system to automatically find an applicable activity schema for solving task problems. We demonstrate the utility of our approach in a set of classes of problems in a simulated domain and a class of real world tasks in a fully physically simulated PR2 robot in Gazebo.