 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeComputing the Scope of Applicability for Acquired Task Knowledge in Experience-Based Planning Domains
Mar 13, 2019


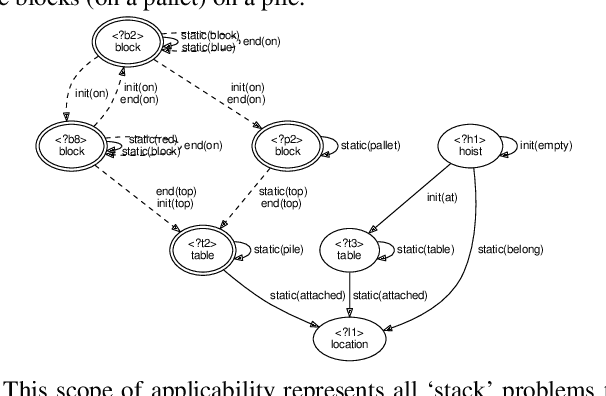
Experience-based planning domains have been proposed to improve problem solving by learning from experience. They rely on acquiring and using task knowledge, i.e., activity schemata, for generating solutions to problem instances in a class of tasks. Using Three-Valued Logic Analysis (TVLA), we extend previous work to generate a set of conditions that determine the scope of applicability of an activity schema. The inferred scope is a bounded representation of a set of problems of potentially unbounded size, in the form of a 3-valued logical structure, which is used to automatically find an applicable activity schema for solving task problems. We validate this work in two classical planning domains.
Learning Task Knowledge and its Scope of Applicability in Experience-Based Planning Domains
Mar 05, 2019



Experience-based planning domains (EBPDs) have been recently proposed to improve problem solving by learning from experience. EBPDs provide important concepts for long-term learning and planning in robotics. They rely on acquiring and using task knowledge, i.e., activity schemata, for generating concrete solutions to problem instances in a class of tasks. Using Three-Valued Logic Analysis (TVLA), we extend previous work to generate a set of conditions as the scope of applicability for an activity schema. The inferred scope is a bounded representation of a set of problems of potentially unbounded size, in the form of a 3-valued logical structure, which allows an EBPD system to automatically find an applicable activity schema for solving task problems. We demonstrate the utility of our approach in a set of classes of problems in a simulated domain and a class of real world tasks in a fully physically simulated PR2 robot in Gazebo.