Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeComputing the Scope of Applicability for Acquired Task Knowledge in Experience-Based Planning Domains
Paper and Code
Mar 13, 2019


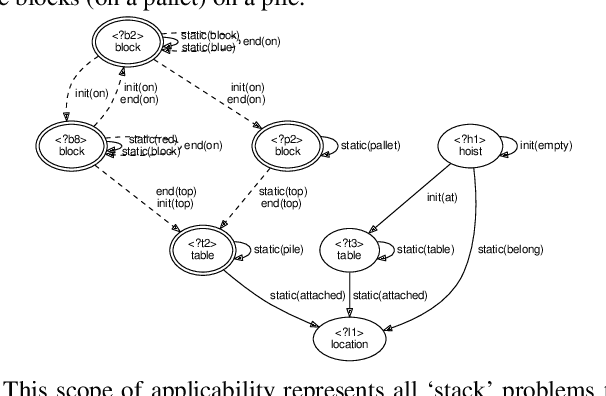
Experience-based planning domains have been proposed to improve problem solving by learning from experience. They rely on acquiring and using task knowledge, i.e., activity schemata, for generating solutions to problem instances in a class of tasks. Using Three-Valued Logic Analysis (TVLA), we extend previous work to generate a set of conditions that determine the scope of applicability of an activity schema. The inferred scope is a bounded representation of a set of problems of potentially unbounded size, in the form of a 3-valued logical structure, which is used to automatically find an applicable activity schema for solving task problems. We validate this work in two classical planning domains.
* 8 pages, conference paper. arXiv admin note: text overlap with
arXiv:1902.10770
View paper on