 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSupervised Learning of the Next-Best-View for 3D Object Reconstruction
May 14, 2019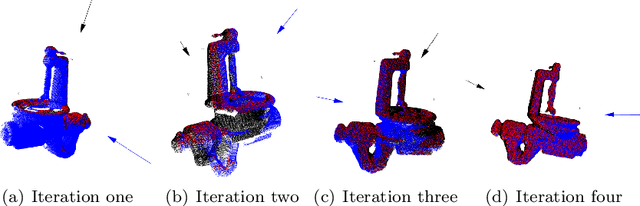
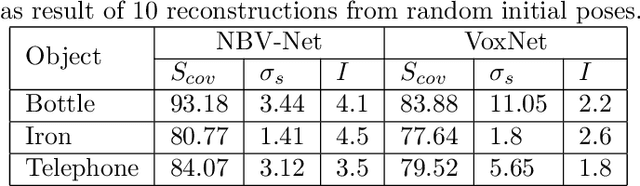
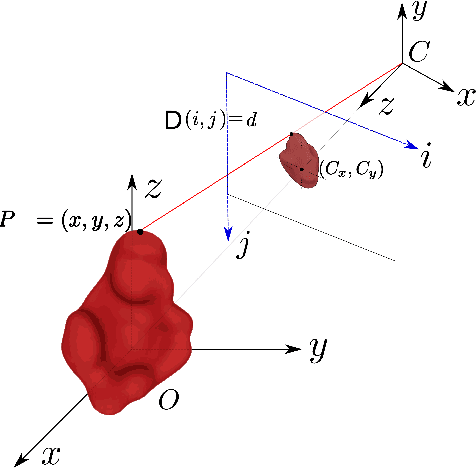
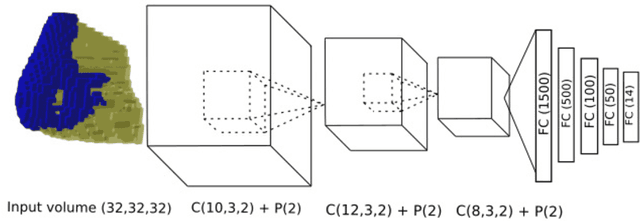
Motivated by the advances in 3D sensing technology and the spreading of low-cost robotic platforms, 3D object reconstruction has become a common task in many areas. Nevertheless, the selection of the optimal sensor pose that maximizes the reconstructed surface is a problem that remains open. It is known in the literature as the next-best-view planning problem. In this paper, we propose a novel next-best-view planning scheme based on supervised deep learning. The scheme contains an algorithm for automatic generation of datasets and an original three-dimensional convolutional neural network (3D-CNN) used to learn the next-best-view. Unlike previous work where the problem is addressed as a search, the trained 3D-CNN directly predicts the sensor pose. We present a comparison of the proposed network against a similar net, and we present several experiments of the reconstruction of unknown objects validating the effectiveness of the proposed scheme.
Expressing Relational and Temporal Knowledge in Visual Probabilistic Networks
Mar 13, 2013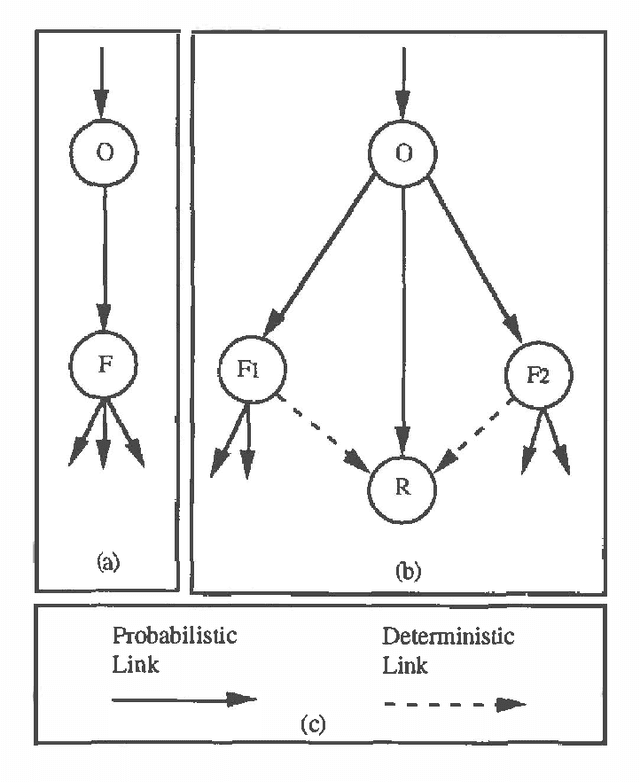
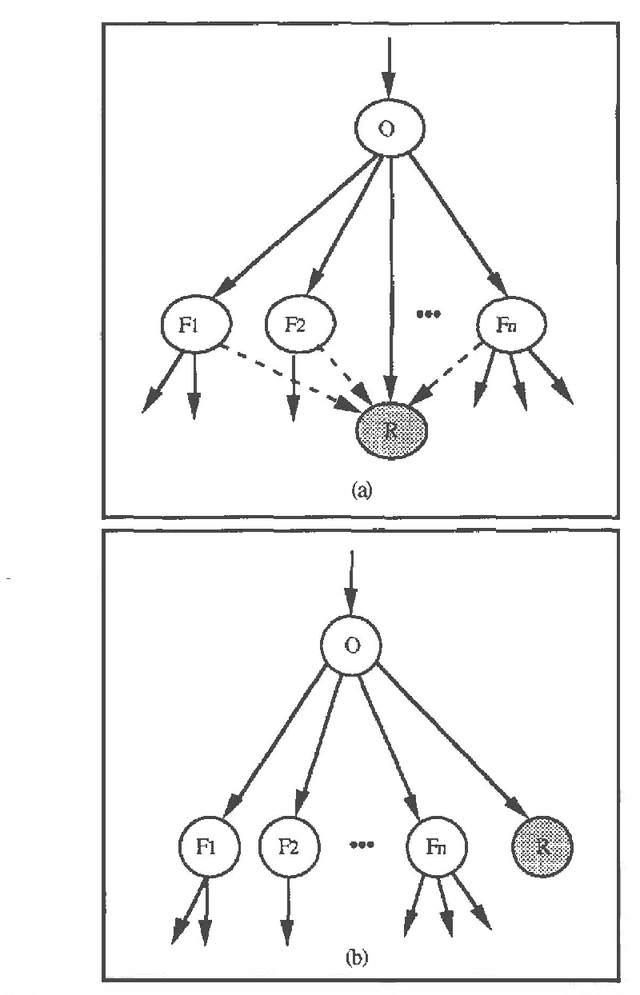
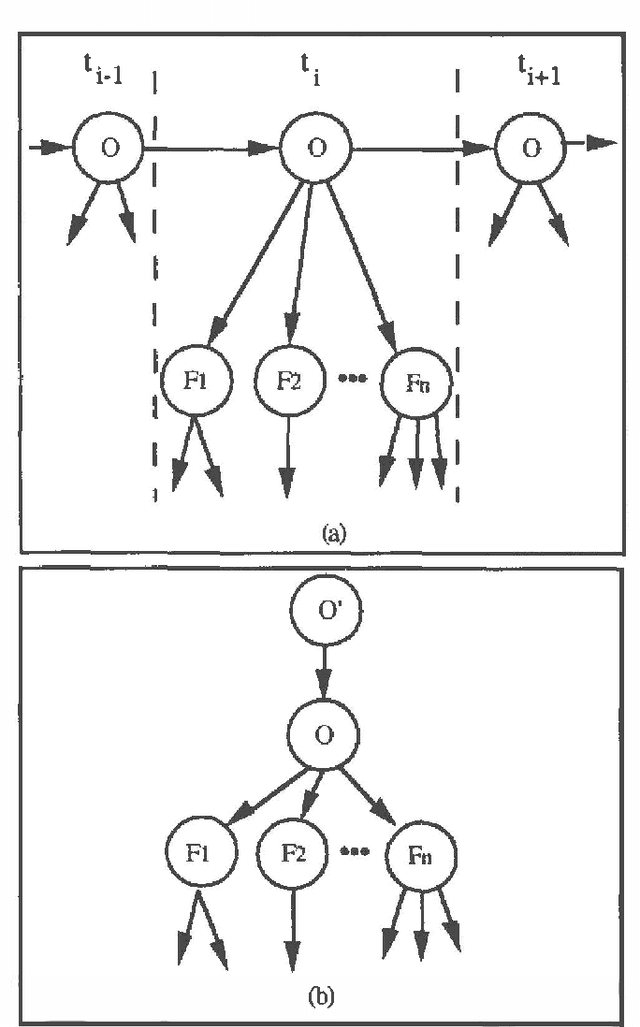
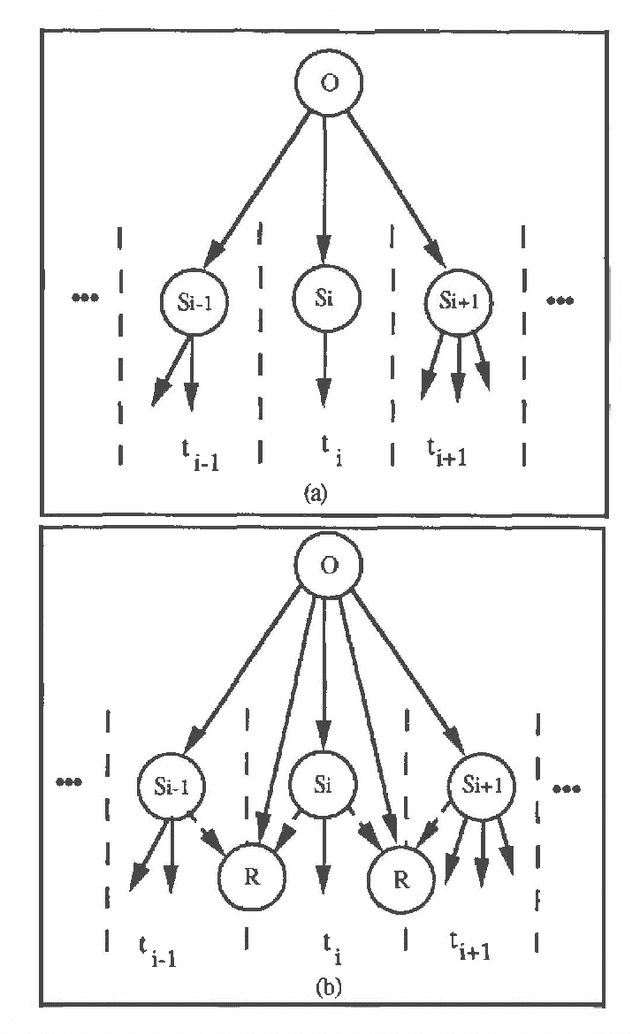
Bayesian networks have been used extensively in diagnostic tasks such as medicine, where they represent the dependency relations between a set of symptoms and a set of diseases. A criticism of this type of knowledge representation is that it is restricted to this kind of task, and that it cannot cope with the knowledge required in other artificial intelligence applications. For example, in computer vision, we require the ability to model complex knowledge, including temporal and relational factors. In this paper we extend Bayesian networks to model relational and temporal knowledge for high-level vision. These extended networks have a simple structure which permits us to propagate probability efficiently. We have applied them to the domain of endoscopy, illustrating how the general modelling principles can be used in specific cases.
A Probabilistic Model For Sensor Validation
Feb 13, 2013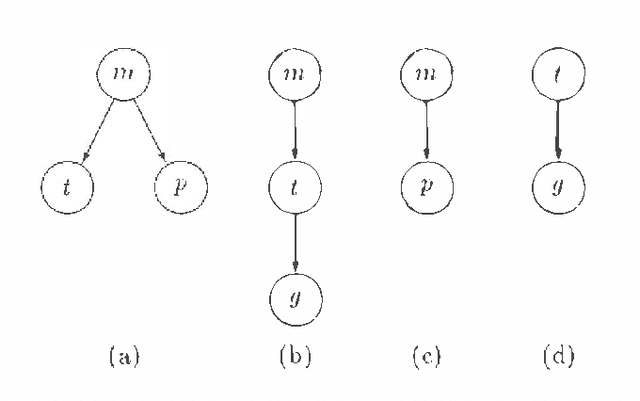
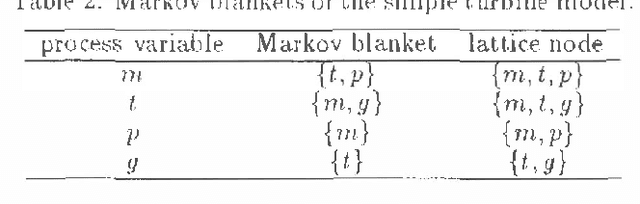
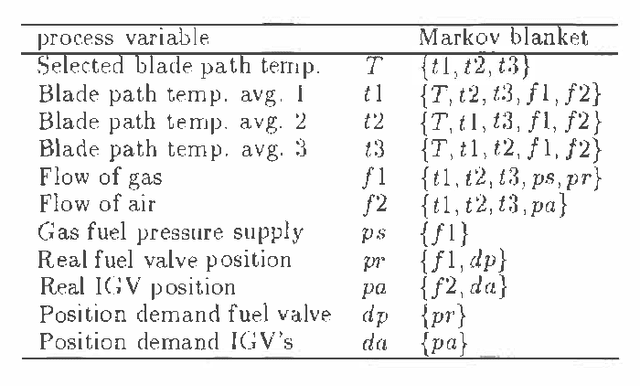
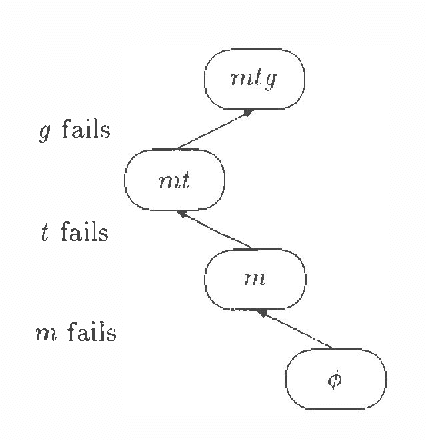
The validation of data from sensors has become an important issue in the operation and control of modern industrial plants. One approach is to use knowledge based techniques to detect inconsistencies in measured data. This article presents a probabilistic model for the detection of such inconsistencies. Based on probability propagation, this method is able to find the existence of a possible fault among the set of sensors. That is, if an error exists, many sensors present an apparent fault due to the propagation from the sensor(s) with a real fault. So the fault detection mechanism can only tell if a sensor has a potential fault, but it can not tell if the fault is real or apparent. So the central problem is to develop a theory, and then an algorithm, for distinguishing real and apparent faults, given that one or more sensors can fail at the same time. This article then, presents an approach based on two levels: (i) probabilistic reasoning, to detect a potential fault, and (ii) constraint management, to distinguish the real fault from the apparent ones. The proposed approach is exemplified by applying it to a power plant model.
Any Time Probabilistic Reasoning for Sensor Validation
Jan 30, 2013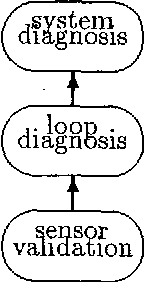
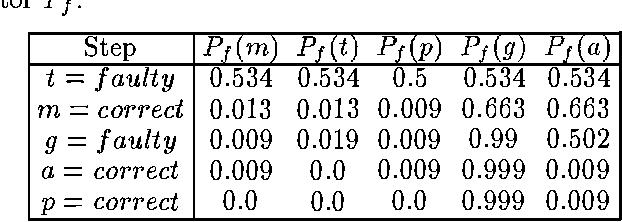
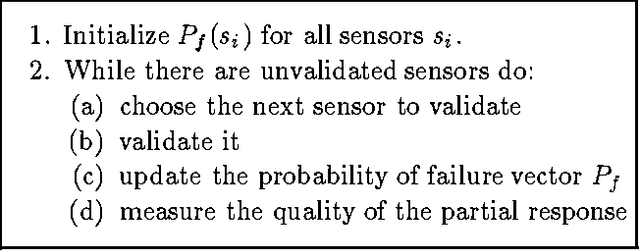
For many real time applications, it is important to validate the information received from the sensors before entering higher levels of reasoning. This paper presents an any time probabilistic algorithm for validating the information provided by sensors. The system consists of two Bayesian network models. The first one is a model of the dependencies between sensors and it is used to validate each sensor. It provides a list of potentially faulty sensors. To isolate the real faults, a second Bayesian network is used, which relates the potential faults with the real faults. This second model is also used to make the validation algorithm any time, by validating first the sensors that provide more information. To select the next sensor to validate, and measure the quality of the results at each stage, an entropy function is used. This function captures in a single quantity both the certainty and specificity measures of any time algorithms. Together, both models constitute a mechanism for validating sensors in an any time fashion, providing at each step the probability of correct/faulty for each sensor, and the total quality of the results. The algorithm has been tested in the validation of temperature sensors of a power plant.
A Temporal Bayesian Network for Diagnosis and Prediction
Jan 23, 2013
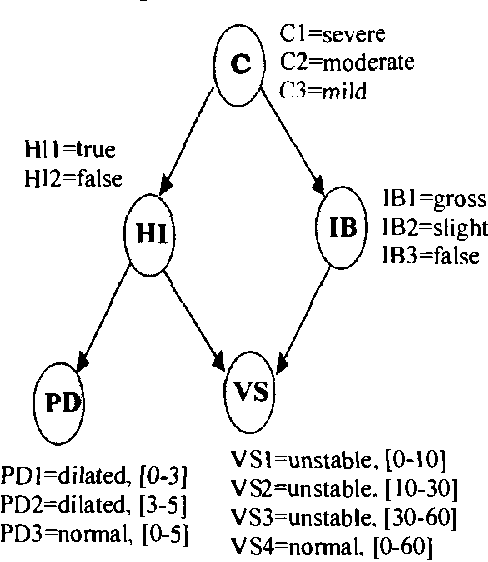
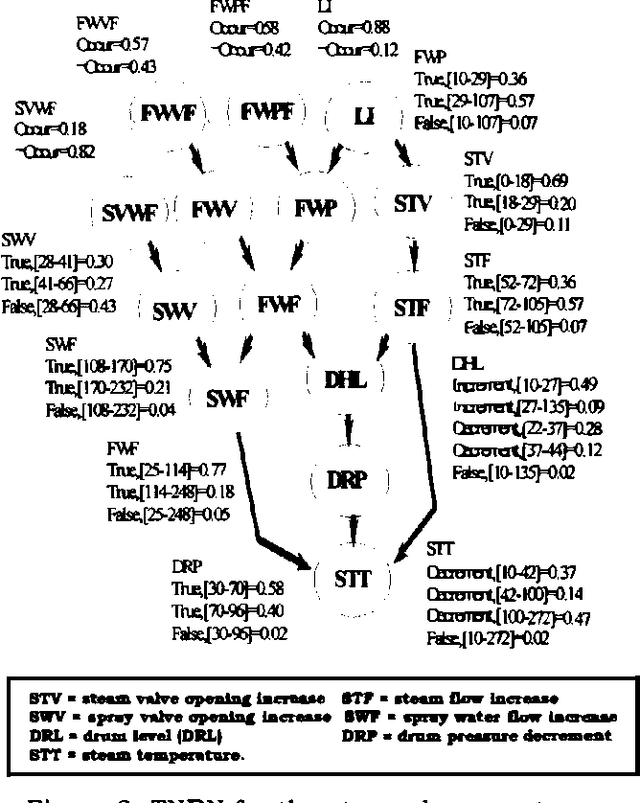
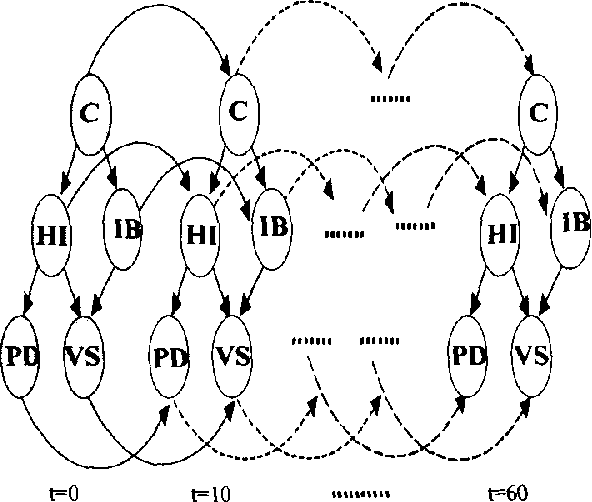
Diagnosis and prediction in some domains, like medical and industrial diagnosis, require a representation that combines uncertainty management and temporal reasoning. Based on the fact that in many cases there are few state changes in the temporal range of interest, we propose a novel representation called Temporal Nodes Bayesian Networks (TNBN). In a TNBN each node represents an event or state change of a variable, and an arc corresponds to a causal-temporal relationship. The temporal intervals can differ in number and size for each temporal node, so this allows multiple granularity. Our approach is contrasted with a dynamic Bayesian network for a simple medical example. An empirical evaluation is presented for a more complex problem, a subsystem of a fossil power plant, in which this approach is used for fault diagnosis and prediction with good results.