 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSemantic Trajectory Generation for Goal-Oriented Spacecraft Rendezvous
Dec 11, 2025Reliable real-time trajectory generation is essential for future autonomous spacecraft. While recent progress in nonconvex guidance and control is paving the way for onboard autonomous trajectory optimization, these methods still rely on extensive expert input (e.g., waypoints, constraints, mission timelines, etc.), which limits the operational scalability in real rendezvous missions. This paper introduces SAGES (Semantic Autonomous Guidance Engine for Space), a trajectory-generation framework that translates natural-language commands into spacecraft trajectories that reflect high-level intent while respecting nonconvex constraints. Experiments in two settings -- fault-tolerant proximity operations with continuous-time constraint enforcement and a free-flying robotic platform -- demonstrate that SAGES reliably produces trajectories aligned with human commands, achieving over 90% semantic-behavioral consistency across diverse behavior modes. Ultimately, this work marks an initial step toward language-conditioned, constraint-aware spacecraft trajectory generation, enabling operators to interactively guide both safety and behavior through intuitive natural-language commands with reduced expert burden.
Taming High-Dimensional Dynamics: Learning Optimal Projections onto Spectral Submanifolds
Apr 04, 2025
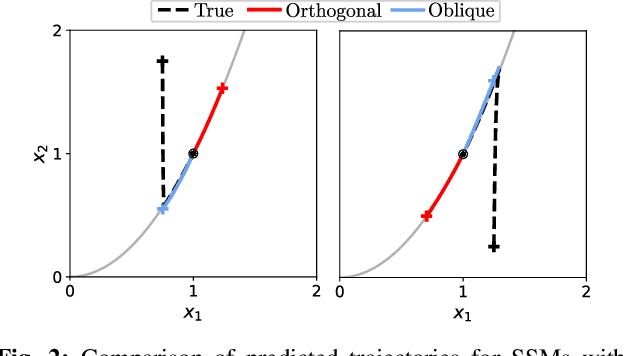


High-dimensional nonlinear systems pose considerable challenges for modeling and control across many domains, from fluid mechanics to advanced robotics. Such systems are typically approximated with reduced order models, which often rely on orthogonal projections, a simplification that may lead to large prediction errors. In this work, we derive optimality of fiber-aligned projections onto spectral submanifolds, preserving the nonlinear geometric structure and minimizing long-term prediction error. We propose a computationally tractable procedure to approximate these projections from data, and show how the effect of control can be incorporated. For a 180-dimensional robotic system, we demonstrate that our reduced-order models outperform previous state-of-the-art approaches by up to fivefold in trajectory tracking accuracy under model predictive control.
Data-Driven Soft Robot Control via Adiabatic Spectral Submanifolds
Mar 13, 2025The mechanical complexity of soft robots creates significant challenges for their model-based control. Specifically, linear data-driven models have struggled to control soft robots on complex, spatially extended paths that explore regions with significant nonlinear behavior. To account for these nonlinearities, we develop here a model-predictive control strategy based on the recent theory of adiabatic spectral submanifolds (aSSMs). This theory is applicable because the internal vibrations of heavily overdamped robots decay at a speed that is much faster than the desired speed of the robot along its intended path. In that case, low-dimensional attracting invariant manifolds (aSSMs) emanate from the path and carry the dominant dynamics of the robot. Aided by this recent theory, we devise an aSSM-based model-predictive control scheme purely from data. We demonstrate the effectiveness of this data-driven model on various dynamic trajectory tracking tasks on a high-fidelity and high-dimensional finite-element model of a soft trunk robot. Notably, we find that four- or five-dimensional aSSM-reduced models outperform the tracking performance of other data-driven modeling methods by a factor up to 10 across all closed-loop control tasks.
Robust Nonlinear Reduced-Order Model Predictive Control
Sep 11, 2023Real-world systems are often characterized by high-dimensional nonlinear dynamics, making them challenging to control in real time. While reduced-order models (ROMs) are frequently employed in model-based control schemes, dimensionality reduction introduces model uncertainty which can potentially compromise the stability and safety of the original high-dimensional system. In this work, we propose a novel reduced-order model predictive control (ROMPC) scheme to solve constrained optimal control problems for nonlinear, high-dimensional systems. To address the challenges of using ROMs in predictive control schemes, we derive an error bounding system that dynamically accounts for model reduction error. Using these bounds, we design a robust MPC scheme that ensures robust constraint satisfaction, recursive feasibility, and asymptotic stability. We demonstrate the effectiveness of our proposed method in simulations on a high-dimensional soft robot with nearly 10,000 states.