 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeChemist Eye: A Visual Language Model-Powered System for Safety Monitoring and Robot Decision-Making in Self-Driving Laboratories
Aug 07, 2025The integration of robotics and automation into self-driving laboratories (SDLs) can introduce additional safety complexities, in addition to those that already apply to conventional research laboratories. Personal protective equipment (PPE) is an essential requirement for ensuring the safety and well-being of workers in laboratories, self-driving or otherwise. Fires are another important risk factor in chemical laboratories. In SDLs, fires that occur close to mobile robots, which use flammable lithium batteries, could have increased severity. Here, we present Chemist Eye, a distributed safety monitoring system designed to enhance situational awareness in SDLs. The system integrates multiple stations equipped with RGB, depth, and infrared cameras, designed to monitor incidents in SDLs. Chemist Eye is also designed to spot workers who have suffered a potential accident or medical emergency, PPE compliance and fire hazards. To do this, Chemist Eye uses decision-making driven by a vision-language model (VLM). Chemist Eye is designed for seamless integration, enabling real-time communication with robots. Based on the VLM recommendations, the system attempts to drive mobile robots away from potential fire locations, exits, or individuals not wearing PPE, and issues audible warnings where necessary. It also integrates with third-party messaging platforms to provide instant notifications to lab personnel. We tested Chemist Eye with real-world data from an SDL equipped with three mobile robots and found that the spotting of possible safety hazards and decision-making performances reached 97 % and 95 %, respectively.
An Open-source Capping Machine Suitable for Confined Spaces
Jun 04, 2025In the context of self-driving laboratories (SDLs), ensuring automated and error-free capping is crucial, as it is a ubiquitous step in sample preparation. Automated capping in SDLs can occur in both large and small workspaces (e.g., inside a fume hood). However, most commercial capping machines are designed primarily for large spaces and are often too bulky for confined environments. Moreover, many commercial products are closed-source, which can make their integration into fully autonomous workflows difficult. This paper introduces an open-source capping machine suitable for compact spaces, which also integrates a vision system that recognises capping failure. The capping and uncapping processes are repeated 100 times each to validate the machine's design and performance. As a result, the capping machine reached a 100 % success rate for capping and uncapping. Furthermore, the machine sealing capacities are evaluated by capping 12 vials filled with solvents of different vapour pressures: water, ethanol and acetone. The vials are then weighed every 3 hours for three days. The machine's performance is benchmarked against an industrial capping machine (a Chemspeed station) and manual capping. The vials capped with the prototype lost 0.54 % of their content weight on average per day, while the ones capped with the Chemspeed and manually lost 0.0078 % and 0.013 %, respectively. The results show that the capping machine is a reasonable alternative to industrial and manual capping, especially when space and budget are limitations in SDLs.
Powder-Bot: A Modular Autonomous Multi-Robot Workflow for Powder X-Ray Diffraction
Sep 01, 2023Powder X-ray diffraction (PXRD) is a key technique for the structural characterisation of solid-state materials, but compared with tasks such as liquid handling, its end-to-end automation is highly challenging. This is because coupling PXRD experiments with crystallisation comprises multiple solid handling steps that include sample recovery, sample preparation by grinding, sample mounting and, finally, collection of X-ray diffraction data. Each of these steps has individual technical challenges from an automation perspective, and hence no commercial instrument exists that can grow crystals, process them into a powder, mount them in a diffractometer, and collect PXRD data in an autonomous, closed-loop way. Here we present an automated robotic workflow to carry out autonomous PXRD experiments. The PXRD data collected for polymorphs of small organic compounds is comparable to that collected under the same conditions manually. Beyond accelerating PXRD experiments, this workflow involves 13 component steps and integrates three different types of robots, each from a separate supplier, illustrating the power of flexible, modular automation in complex, multitask laboratories.
SOLIS: Autonomous Solubility Screening using Deep Neural Networks
Mar 18, 2022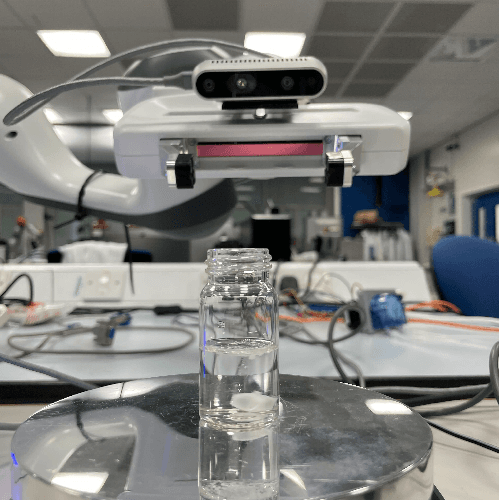


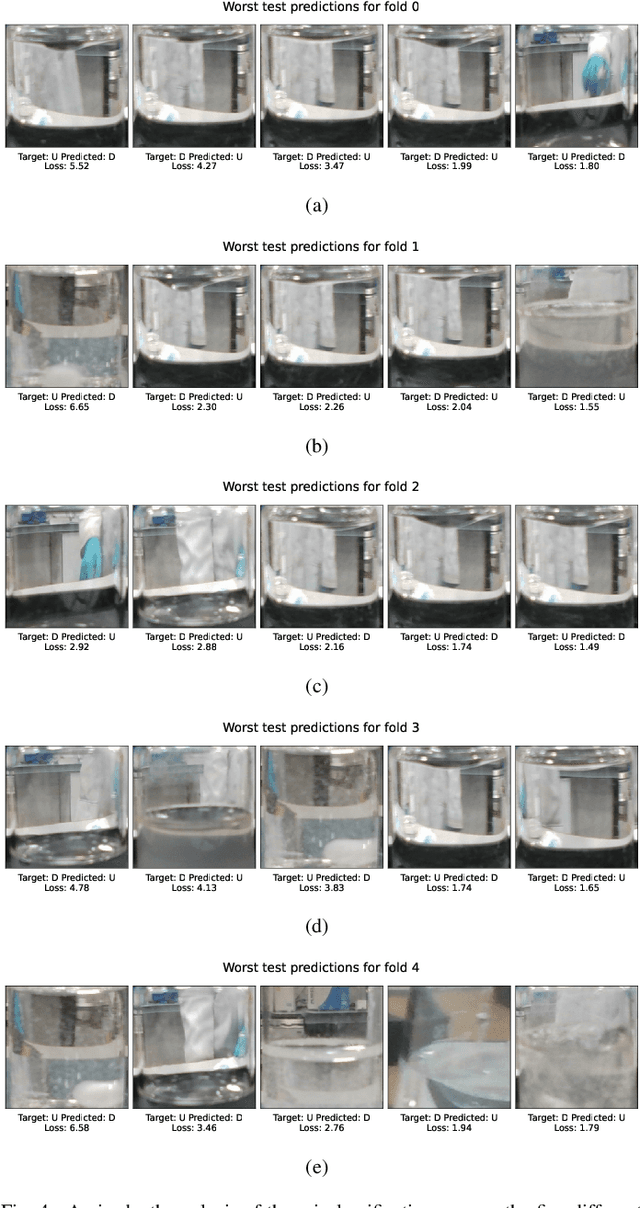
Accelerating material discovery has tremendous societal and industrial impact, particularly for pharmaceuticals and clean energy production. Many experimental instruments have some degree of automation, facilitating continuous running and higher throughput. However, it is common that sample preparation is still carried out manually. This can result in researchers spending a significant amount of their time on repetitive tasks, which introduces errors and can prohibit production of statistically relevant data. Crystallisation experiments are common in many chemical fields, both for purification and in polymorph screening experiments. The initial step often involves a solubility screen of the molecule; that is, understanding whether molecular compounds have dissolved in a particular solvent. This usually can be time consuming and work intensive. Moreover, accurate knowledge of the precise solubility limit of the molecule is often not required, and simply measuring a threshold of solubility in each solvent would be sufficient. To address this, we propose a novel cascaded deep model that is inspired by how a human chemist would visually assess a sample to determine whether the solid has completely dissolved in the solution. In this paper, we design, develop, and evaluate the first fully autonomous solubility screening framework, which leverages state-of-the-art methods for image segmentation and convolutional neural networks for image classification. To realise that, we first create a dataset comprising different molecules and solvents, which is collected in a real-world chemistry laboratory. We then evaluated our method on the data recorded through an eye-in-hand camera mounted on a seven degree-of-freedom robotic manipulator, and show that our model can achieve 99.13% test accuracy across various setups.