 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeImpact of Video Compression Artifacts on Fisheye Camera Visual Perception Tasks
Mar 25, 2024



Autonomous driving systems require extensive data collection schemes to cover the diverse scenarios needed for building a robust and safe system. The data volumes are in the order of Exabytes and have to be stored for a long period of time (i.e., more than 10 years of the vehicle's life cycle). Lossless compression doesn't provide sufficient compression ratios, hence, lossy video compression has been explored. It is essential to prove that lossy video compression artifacts do not impact the performance of the perception algorithms. However, there is limited work in this area to provide a solid conclusion. In particular, there is no such work for fisheye cameras, which have high radial distortion and where compression may have higher artifacts. Fisheye cameras are commonly used in automotive systems for 3D object detection task. In this work, we provide the first analysis of the impact of standard video compression codecs on wide FOV fisheye camera images. We demonstrate that the achievable compression with negligible impact depends on the dataset and temporal prediction of the video codec. We propose a radial distortion-aware zonal metric to evaluate the performance of artifacts in fisheye images. In addition, we present a novel method for estimating affine mode parameters of the latest VVC codec, and suggest some areas for improvement in video codecs for the application to fisheye imagery.
Neural Rendering based Urban Scene Reconstruction for Autonomous Driving
Feb 09, 2024Dense 3D reconstruction has many applications in automated driving including automated annotation validation, multimodal data augmentation, providing ground truth annotations for systems lacking LiDAR, as well as enhancing auto-labeling accuracy. LiDAR provides highly accurate but sparse depth, whereas camera images enable estimation of dense depth but noisy particularly at long ranges. In this paper, we harness the strengths of both sensors and propose a multimodal 3D scene reconstruction using a framework combining neural implicit surfaces and radiance fields. In particular, our method estimates dense and accurate 3D structures and creates an implicit map representation based on signed distance fields, which can be further rendered into RGB images, and depth maps. A mesh can be extracted from the learned signed distance field and culled based on occlusion. Dynamic objects are efficiently filtered on the fly during sampling using 3D object detection models. We demonstrate qualitative and quantitative results on challenging automotive scenes.
Optical Flow for Autonomous Driving: Applications, Challenges and Improvements
Jan 11, 2023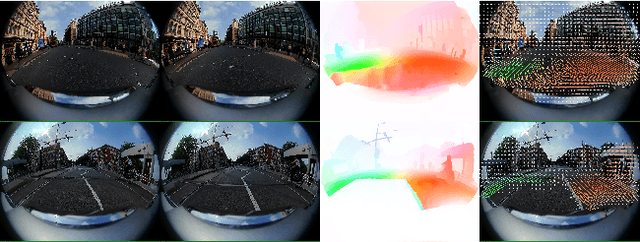
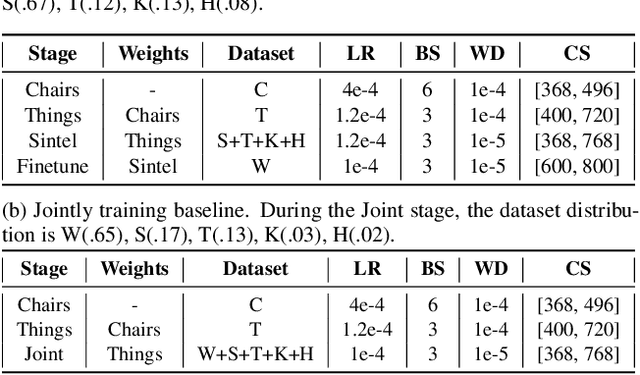
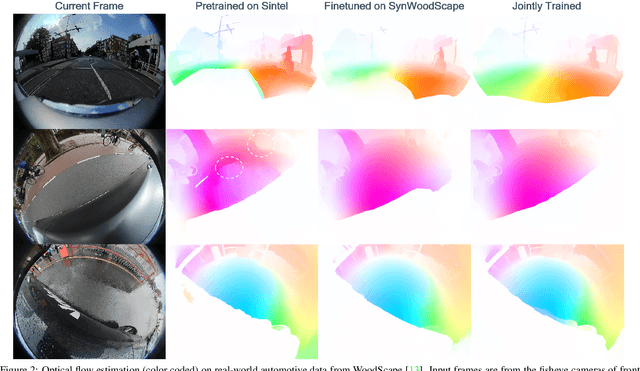
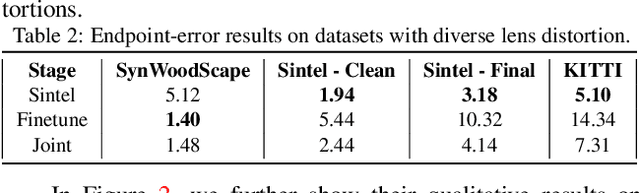
Optical flow estimation is a well-studied topic for automated driving applications. Many outstanding optical flow estimation methods have been proposed, but they become erroneous when tested in challenging scenarios that are commonly encountered. Despite the increasing use of fisheye cameras for near-field sensing in automated driving, there is very limited literature on optical flow estimation with strong lens distortion. Thus we propose and evaluate training strategies to improve a learning-based optical flow algorithm by leveraging the only existing fisheye dataset with optical flow ground truth. While trained with synthetic data, the model demonstrates strong capabilities to generalize to real world fisheye data. The other challenge neglected by existing state-of-the-art algorithms is low light. We propose a novel, generic semi-supervised framework that significantly boosts performances of existing methods in such conditions. To the best of our knowledge, this is the first approach that explicitly handles optical flow estimation in low light.