 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMultimodal Coordinated Online Behavior: Trade-offs and Strategies
Jul 16, 2025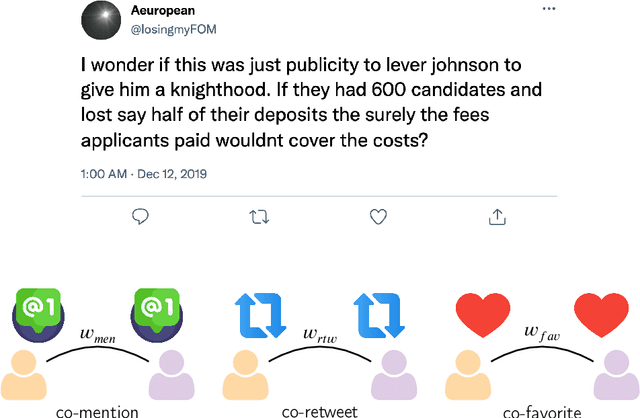



Coordinated online behavior, which spans from beneficial collective actions to harmful manipulation such as disinformation campaigns, has become a key focus in digital ecosystem analysis. Traditional methods often rely on monomodal approaches, focusing on single types of interactions like co-retweets or co-hashtags, or consider multiple modalities independently of each other. However, these approaches may overlook the complex dynamics inherent in multimodal coordination. This study compares different ways of operationalizing the detection of multimodal coordinated behavior. It examines the trade-off between weakly and strongly integrated multimodal models, highlighting the balance between capturing broader coordination patterns and identifying tightly coordinated behavior. By comparing monomodal and multimodal approaches, we assess the unique contributions of different data modalities and explore how varying implementations of multimodality impact detection outcomes. Our findings reveal that not all the modalities provide distinct insights, but that with a multimodal approach we can get a more comprehensive understanding of coordination dynamics. This work enhances the ability to detect and analyze coordinated online behavior, offering new perspectives for safeguarding the integrity of digital platforms.
Detection and Characterization of Coordinated Online Behavior: A Survey
Aug 02, 2024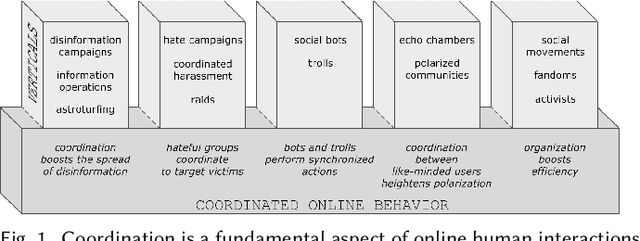
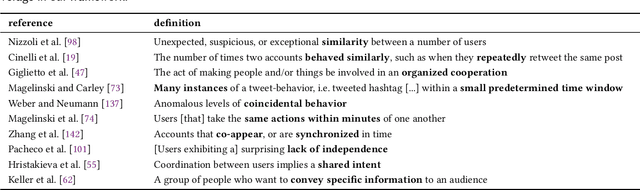
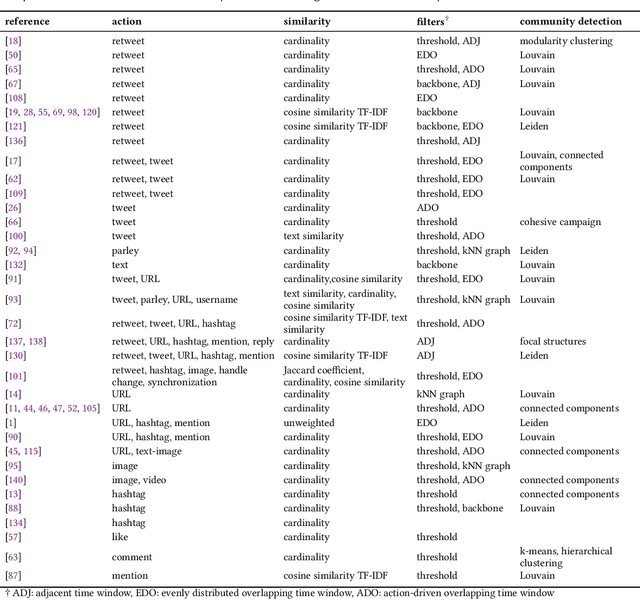
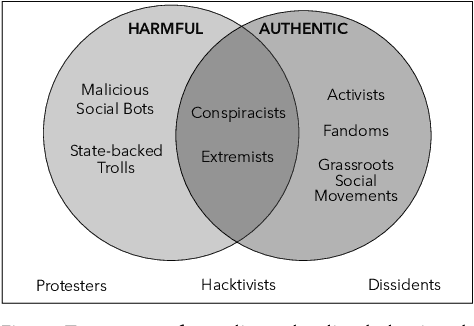
Coordination is a fundamental aspect of life. The advent of social media has made it integral also to online human interactions, such as those that characterize thriving online communities and social movements. At the same time, coordination is also core to effective disinformation, manipulation, and hate campaigns. This survey collects, categorizes, and critically discusses the body of work produced as a result of the growing interest on coordinated online behavior. We reconcile industry and academic definitions, propose a comprehensive framework to study coordinated online behavior, and review and critically discuss the existing detection and characterization methods. Our analysis identifies open challenges and promising directions of research, serving as a guide for scholars, practitioners, and policymakers in understanding and addressing the complexities inherent to online coordination.
MulBot: Unsupervised Bot Detection Based on Multivariate Time Series
Sep 21, 2022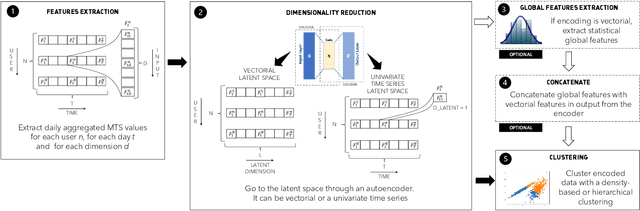
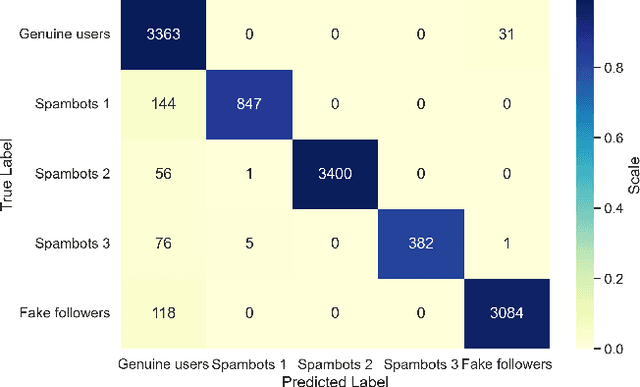
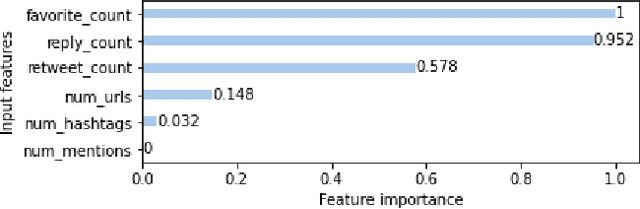

Online social networks are actively involved in the removal of malicious social bots due to their role in the spread of low quality information. However, most of the existing bot detectors are supervised classifiers incapable of capturing the evolving behavior of sophisticated bots. Here we propose MulBot, an unsupervised bot detector based on multivariate time series (MTS). For the first time, we exploit multidimensional temporal features extracted from user timelines. We manage the multidimensionality with an LSTM autoencoder, which projects the MTS in a suitable latent space. Then, we perform a clustering step on this encoded representation to identify dense groups of very similar users -- a known sign of automation. Finally, we perform a binary classification task achieving f1-score $= 0.99$, outperforming state-of-the-art methods (f1-score $\le 0.97$). Not only does MulBot achieve excellent results in the binary classification task, but we also demonstrate its strengths in a novel and practically-relevant task: detecting and separating different botnets. In this multi-class classification task we achieve f1-score $= 0.96$. We conclude by estimating the importance of the different features used in our model and by evaluating MulBot's capability to generalize to new unseen bots, thus proposing a solution to the generalization deficiencies of supervised bot detectors.