 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe Otbot project: Dynamic modelling, parameter identification, and motion control of an omnidirectional tire-wheeled robot
Nov 17, 2023
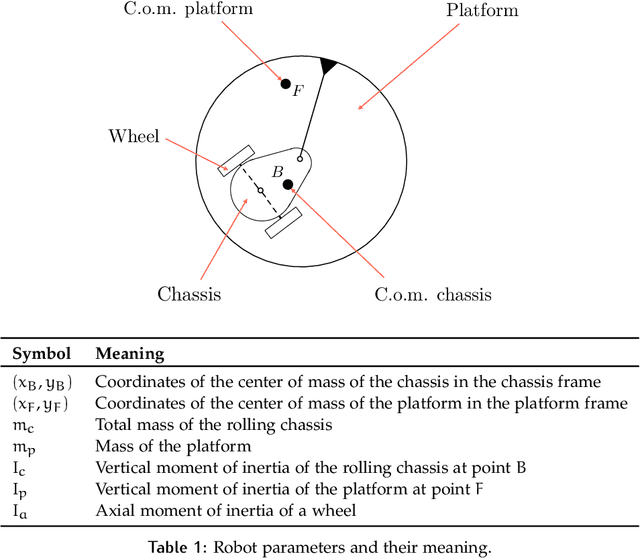


In recent years, autonomous mobile platforms are finding an increasing range of applications in inspection or surveillance tasks, or to the transport of objects, in places such as smart warehouses, factories or hospitals. In these environments it is useful for the robot to have omnidirectional capability in the plane, so it can navigate through narrow or cluttered areas, or make position and orientation changes without having to maneuver. While this capability is usually achieved with directional sliding wheels, this work studies a particular robot that achieves omnidirectionality using conventional wheels, which are easier to manufacture and maintain, and support larger loads in general. This robot, which we call ``Otbot'' (for omnidirectional tire-wheeled robot), was already conceived in the late 1990s, but all the controllers that have been proposed for it are based on purely kinematic models so far. These controllers may be sufficient if the robot is light, or if its motors are powerful, but on platforms that have to carry large loads, or that have more limited motors, it is necessary to resort to control laws based on dynamic models if the full acceleration capacities are to be exploited. This work develops a dynamic model of Otbot, proposes a plausible methodology to identify its parameters, and designs a control law that, using this model, is able to track prescribed trajectories in an accurate and robust manner.
Direct Collocation Methods for Trajectory Optimization in Constrained Robotic Systems
Apr 25, 2023



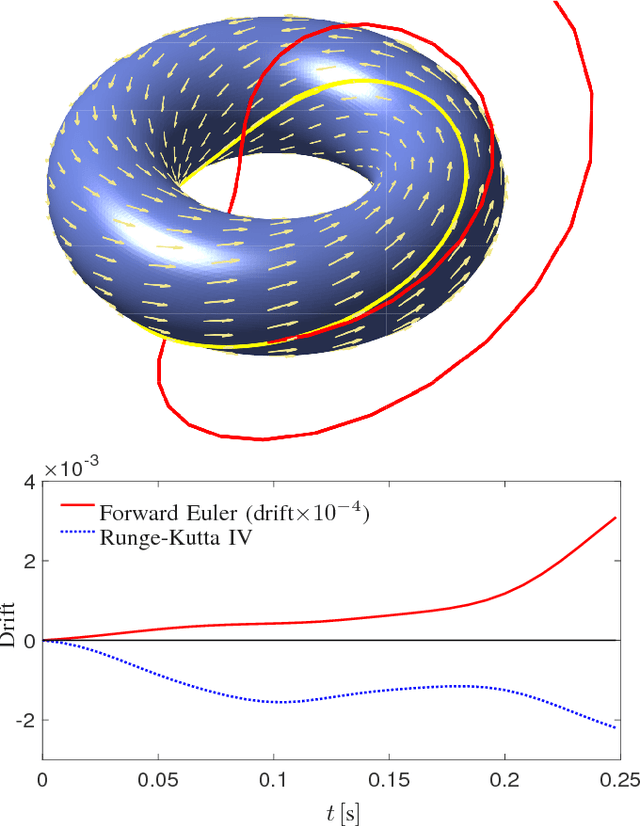
Direct collocation methods are powerful tools to solve trajectory optimization problems in robotics. While their resulting trajectories tend to be dynamically accurate, they may also present large kinematic errors in the case of constrained mechanical systems, i.e., those whose state coordinates are subject to holonomic or nonholonomic constraints, like loop-closure or rolling-contact constraints. These constraints confine the robot trajectories to an implicitly-defined manifold, which complicates the computation of accurate solutions. Discretization errors inherent to the transcription of the problem easily make the trajectories drift away from this manifold, which results in physically inconsistent motions that are difficult to track with a controller. This paper reviews existing methods to deal with this problem and proposes new ones to overcome their limitations. Current approaches either disregard the kinematic constraints (which leads to drift accumulation) or modify the system dynamics to keep the trajectory close to the manifold (which adds artificial forces or energy dissipation to the system). The methods we propose, in contrast, achieve full drift elimination on the discrete trajectory, or even along the continuous one, without artificial modifications of the system dynamics. We illustrate and compare the methods using various examples of different complexity.
How to design, and tune, a computed torque controller: An introduction and a Matlab example
Apr 25, 2023This note briefly introduces the computed torque control method for trajectory tracking. The method is applicable to fully actuated robots, i.e, those whose inverse dynamics can be solved for any feasible acceleration. This includes many systems, like robot arms or hands, or any tree-like mechanism with all its joints actuated. Using simple explanations, we see how such a controller can be obtained using feedback linearization, and how its gains can be tuned to satisfy a desired settling time for the error signal. We end up discussing the advantages and shortcomings of the controller. A companion Matlab script can be downloaded from https://bit.ly/3QShxYi that implements and tests the controller on a simple actuated pendulum.
A Legendre-Gauss Pseudospectral Collocation Method for Trajectory Optimization in Second Order Systems
Feb 17, 2023Pseudospectral collocation methods have proven to be powerful tools to solve optimal control problems. While these methods generally assume the dynamics is given in the first order form $\dot{x} = f (x, u, t)$, where x is the state and u is the control vector, robotic systems are typically governed by second order ODEs of the form $\ddot{q} = g(q, \dot{q}, u, t)$, where q is the configuration. To convert the second order ODE into a first order one, the usual approach is to introduce a velocity variable v and impose its coincidence with the time derivative of q. Lobatto methods grant this constraint by construction, as their polynomials describing the trajectory for v are the time derivatives of those for q, but the same cannot be said for the Gauss and Radau methods. This is problematic for such methods, as then they cannot guarantee that $\ddot{q} = g(q, \dot{q}, u, t)$ at the collocation points. On their negative side, Lobatto methods cannot be used to solve initial value problems, as given the values of u at the collocation points they generate an overconstrained system of equations for the states. In this paper, we propose a Legendre-Gauss collocation method that retains the advantages of the usual Lobatto, Gauss, and Radau methods, while avoiding their shortcomings. The collocation scheme we propose is applicable to solve initial value problems, preserves the consistency between the polynomials for v and q, and ensures that $\ddot{q} = g(q, \dot{q}, u, t)$ at the collocation points.
* 6 pages, 2 figures, published at 2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)
Collocation methods for second and higher order systems
Feb 17, 2023It is often unnoticed that the predominant way to use collocation methods is fundamentally flawed when applied to optimal control in robotics. Such methods assume that the system dynamics is given by a first order ODE, whereas robots are often governed by a second or higher order ODE involving configuration variables and their time derivatives. To apply a collocation method, therefore, the usual practice is to resort to the well known procedure of casting an M th order ODE into M first order ones. This manipulation, which in the continuous domain is perfectly valid, leads to inconsistencies when the problem is discretized. Since the configuration variables and their time derivatives are approximated with polynomials of the same degree, their differential dependencies cannot be fulfilled, and the actual dynamics is not satisfied, not even at the collocation points. This paper draws attention to this problem, and develops improved versions of the trapezoidal and Hermite-Simpson collocation methods that do not present these inconsistencies. In many cases, the new methods reduce the dynamic transcription error in one order of magnitude, or even more, without noticeably increasing the cost of computing the solutions.
Kinodynamic Planning on Constraint Manifolds
May 22, 2017


This paper presents a motion planner for systems subject to kinematic and dynamic constraints. The former appear when kinematic loops are present in the system, such as in parallel manipulators, in robots that cooperate to achieve a given task, or in situations involving contacts with the environment. The latter are necessary to obtain realistic trajectories, taking into account the forces acting on the system. The kinematic constraints make the state space become an implicitly-defined manifold, which complicates the application of common motion planning techniques. To address this issue, the planner constructs an atlas of the state space manifold incrementally, and uses this atlas both to generate random states and to dynamically simulate the steering of the system towards such states. The resulting tools are then exploited to construct a rapidly-exploring random tree (RRT) over the state space. To the best of our knowledge, this is the first randomized kinodynamic planner for implicitly-defined state spaces. The test cases presented in this paper validate the approach in significantly-complex systems.