 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
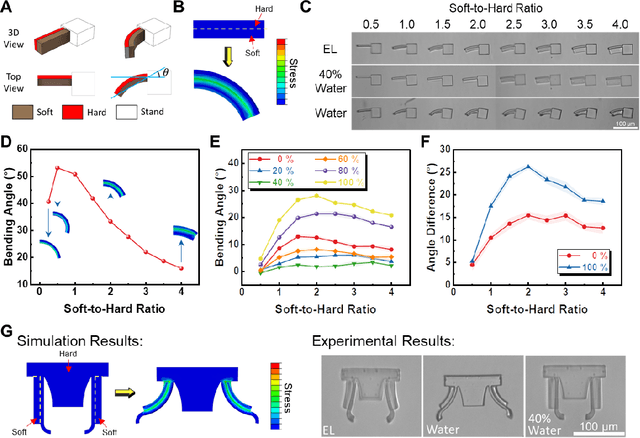
Add to EdgeShape-programmable Adaptive Multi-material Microrobots for Biomedical Applications
Dec 31, 2023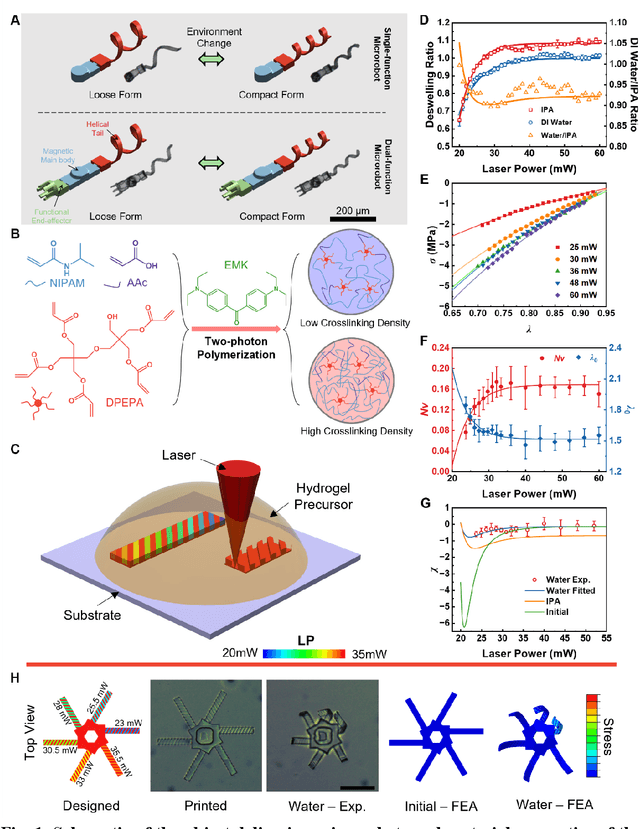
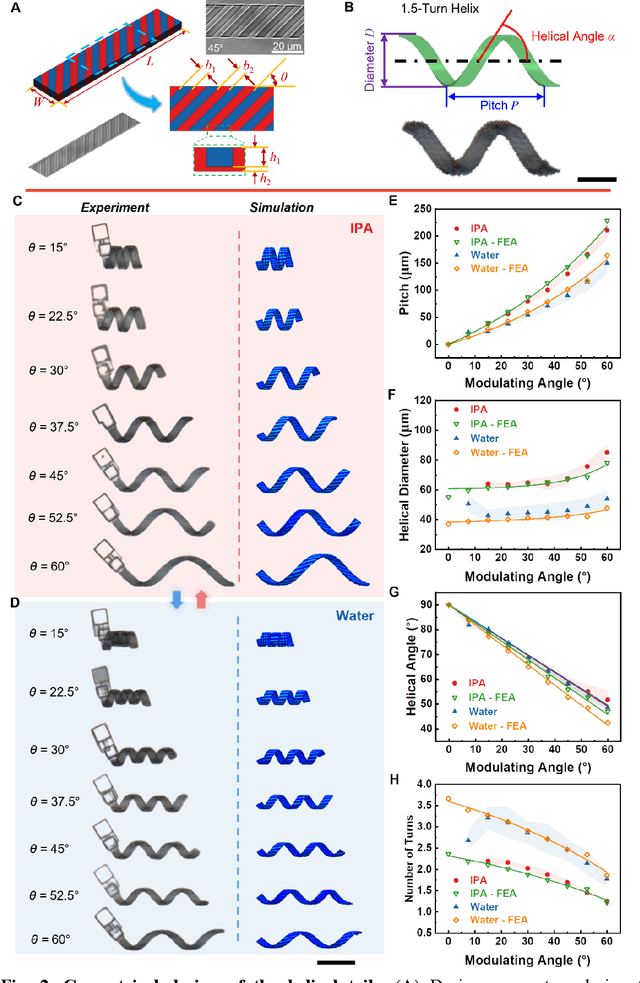
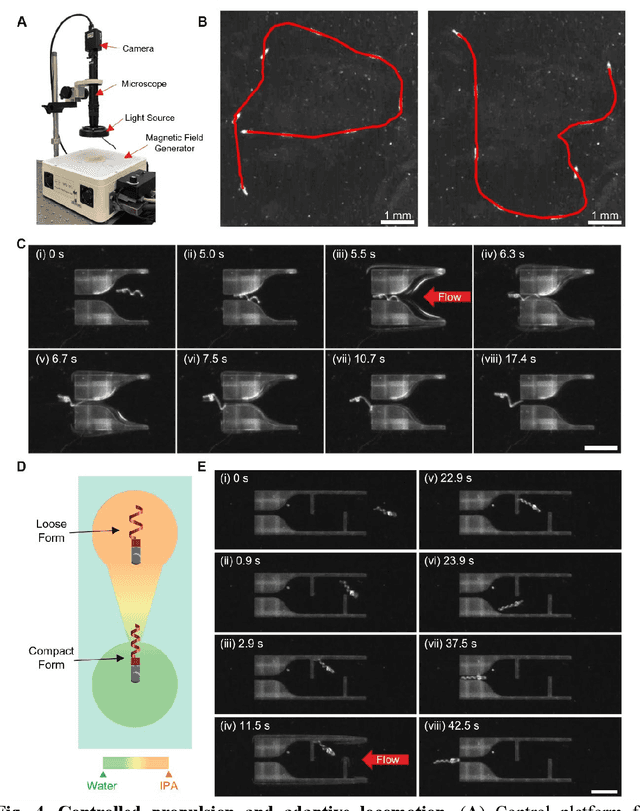
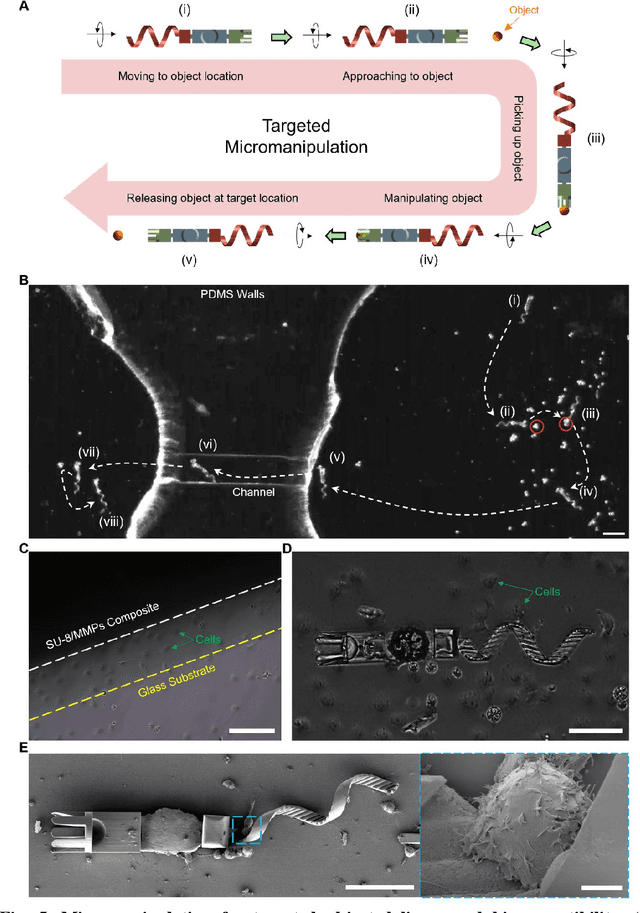
Flagellated microorganisms can swim at low Reynolds numbers and adapt to changes in their environment. Specifically, the flagella can switch their shapes or modes through gene expression. In the past decade, efforts have been made to fabricate and investigate rigid types of microrobots without any adaptation to the environments. More recently, obtaining adaptive microrobots mimicking real microorganisms is getting more attention. However, even though some adaptive microrobots achieved by hydrogels have emerged, the swimming behaviors of the microrobots before and after the environment-induced deformations are not predicted in a systematic standardized way. In this work, experiments, finite element analysis, and dynamic modeling are presented together to realize a complete understanding of these adaptive microrobots. The above three parts are cross-verified proving the success of using such methods, facilitating the bio-applications with shape-programmable and even swimming performance-programmable microrobots. Moreover, an application of targeted object delivery using the proposed microrobot has been successfully demonstrated. Finally, cytotoxicity tests are performed to prove the potential for using the proposed microrobot for biomedical applications.
Responsive Hydrogel-based Modular Microrobots for Multi-functional Micromanipulation
Nov 23, 2023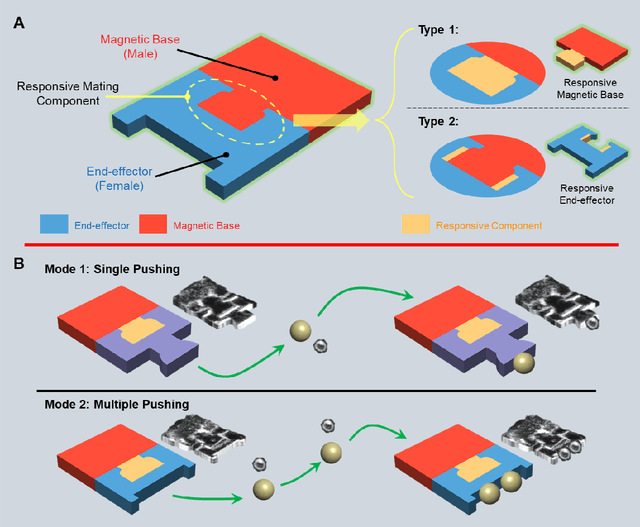


Microrobots show great potential in biomedical applications such as drug delivery and cell manipulations. However, current microrobots are mostly fabricated as a single entity and type and the tasks they can perform are limited. In this paper, modular microrobots, with an overall size of 120 $\mu$m $\times$ 200 $\mu$m, are proposed with responsive mating components, made from stimuli-responsive hydrogels, and application specific end-effectors for microassembly tasks. The modular microrobots are fabricated based on photolithography and two-photon polymerization together or separately. Two types of modular microrobots are created based on the location of the responsive mating component. The first type of modular microrobot has a mating component that can shrink upon stimulation while the second type has a double bilayer structure that can realize an open and close motion. The exchange of end-effectors with an identical actuation base is demonstrated for both types of microrobots. Finally, different manipulation tasks are performed with different types of end-effectors.