 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeResponsive Hydrogel-based Modular Microrobots for Multi-functional Micromanipulation
Paper and Code
Nov 23, 2023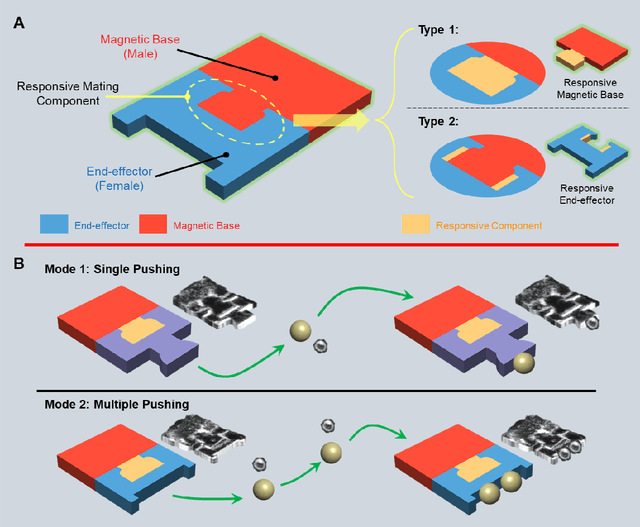


Microrobots show great potential in biomedical applications such as drug delivery and cell manipulations. However, current microrobots are mostly fabricated as a single entity and type and the tasks they can perform are limited. In this paper, modular microrobots, with an overall size of 120 $\mu$m $\times$ 200 $\mu$m, are proposed with responsive mating components, made from stimuli-responsive hydrogels, and application specific end-effectors for microassembly tasks. The modular microrobots are fabricated based on photolithography and two-photon polymerization together or separately. Two types of modular microrobots are created based on the location of the responsive mating component. The first type of modular microrobot has a mating component that can shrink upon stimulation while the second type has a double bilayer structure that can realize an open and close motion. The exchange of end-effectors with an identical actuation base is demonstrated for both types of microrobots. Finally, different manipulation tasks are performed with different types of end-effectors.