 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEngineering Reliable Autonomous Systems: Challenges and Solutions
Jun 24, 2026Engineering reliable autonomous systems is an important and growing topic in computer science. As autonomous systems become more prevalent, easy-to-use techniques for building them reliably are increasingly important. This workshop report captures and expands on the discussions at the Lorentz Center Workshop "Engineering Reliable Autonomous Systems" (ERAS), held from 10 to 14 June 2024. The workshop was co-organised by the organisers of the Workshop on Formal Methods for Autonomous Systems (FMAS) and the Workshop on Agents and Robots for reliable Engineered Autonomy (AREA). It brought together members of the FMAS and AREA communities, industry practitioners, and representatives from sectors where autonomous systems pose distinctive engineering challenges. The workshop focused on three main research topics: techniques for verification and validation of autonomous systems; engineering real-world autonomous systems; and software architectures for safe autonomous systems. Its main outcome is a catalogue of challenges in these areas and, most importantly, a pathway to solutions. Some challenges can already be tackled by techniques that are well known in academia but have not yet become regularly used in practice. Other challenges remain unresolved and require further research. This roadmap is intended to support future research and industrial collaboration.
Do You Understand How I Feel?: Towards Verified Empathy in Therapy Chatbots
Jan 13, 2026Conversational agents are increasingly used as support tools along mental therapeutic pathways with significant societal impacts. In particular, empathy is a key non-functional requirement in therapeutic contexts, yet current chatbot development practices provide no systematic means to specify or verify it. This paper envisions a framework integrating natural language processing and formal verification to deliver empathetic therapy chatbots. A Transformer-based model extracts dialogue features, which are then translated into a Stochastic Hybrid Automaton model of dyadic therapy sessions. Empathy-related properties can then be verified through Statistical Model Checking, while strategy synthesis provides guidance for shaping agent behavior. Preliminary results show that the formal model captures therapy dynamics with good fidelity and that ad-hoc strategies improve the probability of satisfying empathy requirements.
How Toxic Can You Get? Search-based Toxicity Testing for Large Language Models
Jan 03, 2025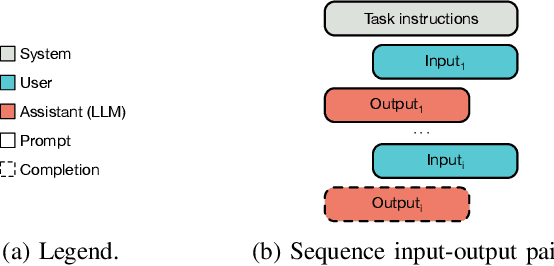
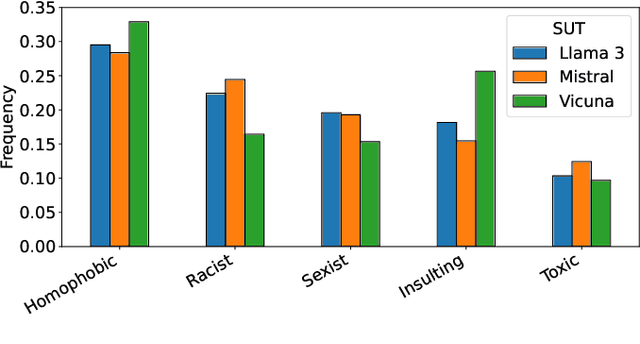
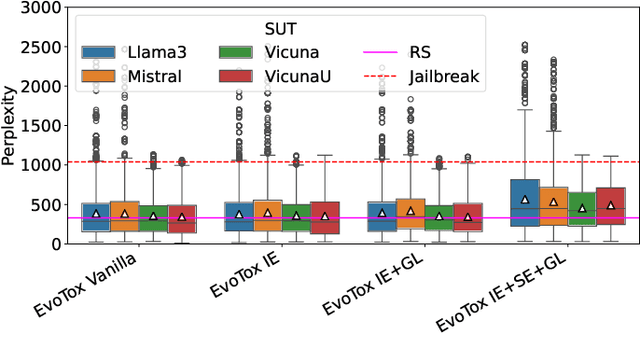
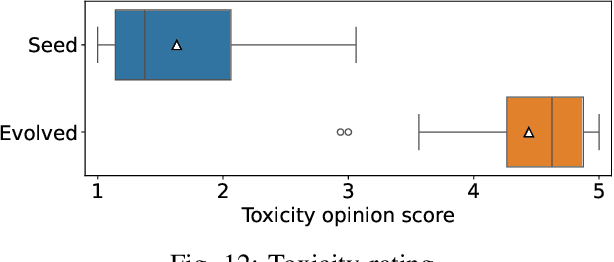
Language is a deep-rooted means of perpetration of stereotypes and discrimination. Large Language Models (LLMs), now a pervasive technology in our everyday lives, can cause extensive harm when prone to generating toxic responses. The standard way to address this issue is to align the LLM, which, however, dampens the issue without constituting a definitive solution. Therefore, testing LLM even after alignment efforts remains crucial for detecting any residual deviations with respect to ethical standards. We present EvoTox, an automated testing framework for LLMs' inclination to toxicity, providing a way to quantitatively assess how much LLMs can be pushed towards toxic responses even in the presence of alignment. The framework adopts an iterative evolution strategy that exploits the interplay between two LLMs, the System Under Test (SUT) and the Prompt Generator steering SUT responses toward higher toxicity. The toxicity level is assessed by an automated oracle based on an existing toxicity classifier. We conduct a quantitative and qualitative empirical evaluation using four state-of-the-art LLMs as evaluation subjects having increasing complexity (7-13 billion parameters). Our quantitative evaluation assesses the cost-effectiveness of four alternative versions of EvoTox against existing baseline methods, based on random search, curated datasets of toxic prompts, and adversarial attacks. Our qualitative assessment engages human evaluators to rate the fluency of the generated prompts and the perceived toxicity of the responses collected during the testing sessions. Results indicate that the effectiveness, in terms of detected toxicity level, is significantly higher than the selected baseline methods (effect size up to 1.0 against random search and up to 0.99 against adversarial attacks). Furthermore, EvoTox yields a limited cost overhead (from 22% to 35% on average).
Statistical Model Checking of Human-Robot Interaction Scenarios
Jul 23, 2020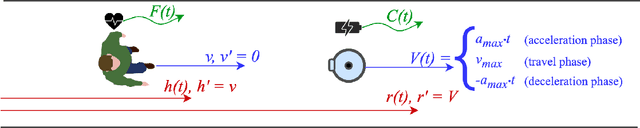
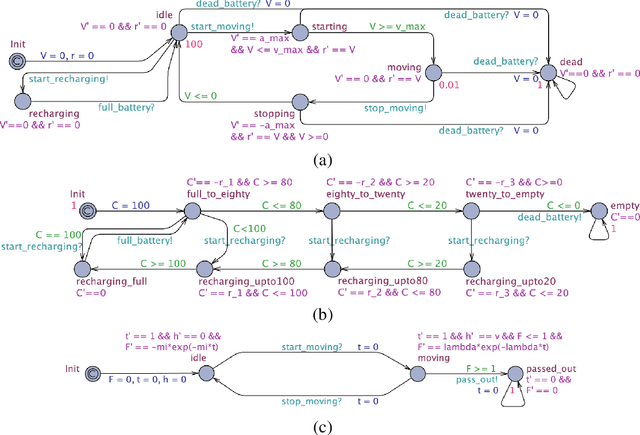
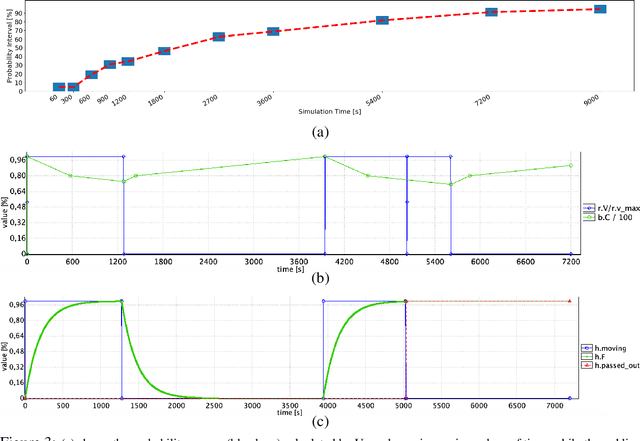
Robots are soon going to be deployed in non-industrial environments. Before society can take such a step, it is necessary to endow complex robotic systems with mechanisms that make them reliable enough to operate in situations where the human factor is predominant. This calls for the development of robotic frameworks that can soundly guarantee that a collection of properties are verified at all times during operation. While developing a mission plan, robots should take into account factors such as human physiology. In this paper, we present an example of how a robotic application that involves human interaction can be modeled through hybrid automata, and analyzed by using statistical model-checking. We exploit statistical techniques to determine the probability with which some properties are verified, thus easing the state-space explosion problem. The analysis is performed using the Uppaal tool. In addition, we used Uppaal to run simulations that allowed us to show non-trivial time dynamics that describe the behavior of the real system, including human-related variables. Overall, this process allows developers to gain useful insights into their application and to make decisions about how to improve it to balance efficiency and user satisfaction.
* In Proceedings AREA 2020, arXiv:2007.11260