 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIntegrating Symmetry into Differentiable Planning
Jun 08, 2022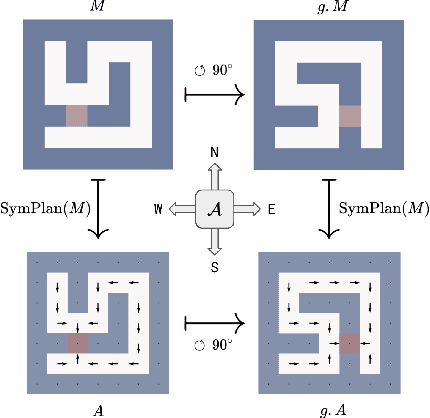
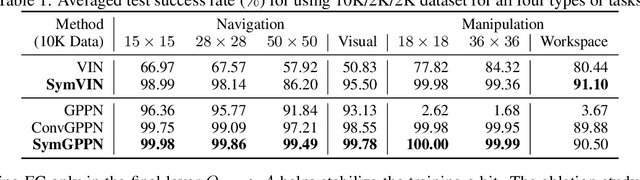
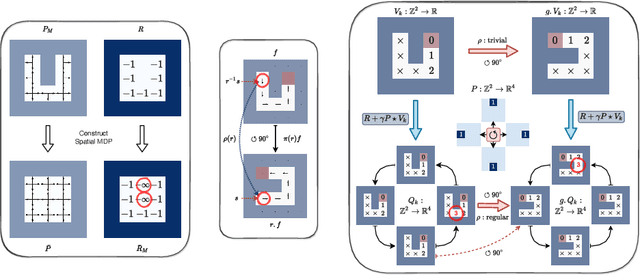
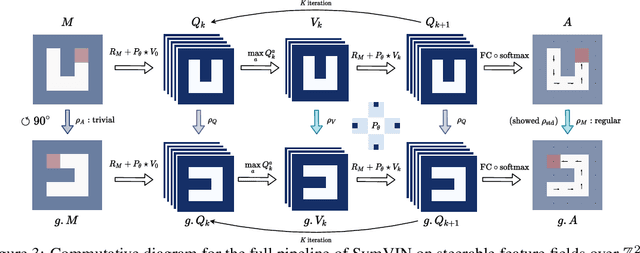
We study how group symmetry helps improve data efficiency and generalization for end-to-end differentiable planning algorithms, specifically on 2D robotic path planning problems: navigation and manipulation. We first formalize the idea from Value Iteration Networks (VINs) on using convolutional networks for path planning, because it avoids explicitly constructing equivalence classes and enable end-to-end planning. We then show that value iteration can always be represented as some convolutional form for (2D) path planning, and name the resulting paradigm Symmetric Planner (SymPlan). In implementation, we use steerable convolution networks to incorporate symmetry. Our algorithms on navigation and manipulation, with given or learned maps, improve training efficiency and generalization performance by large margins over non-equivariant counterparts, VIN and GPPN.
Toward Compositional Generalization in Object-Oriented World Modeling
Apr 28, 2022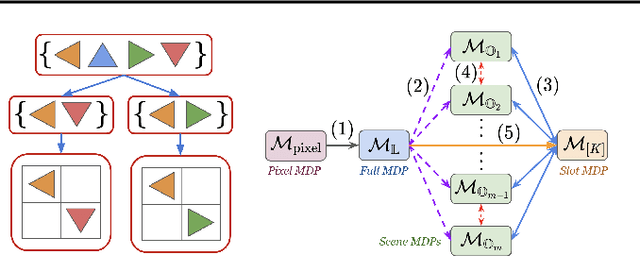

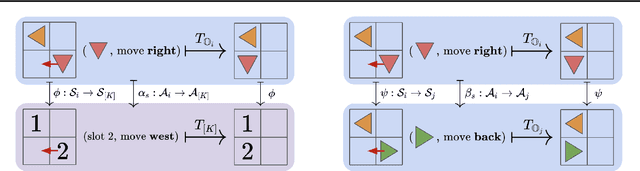

Compositional generalization is a critical ability in learning and decision-making. We focus on the setting of reinforcement learning in object-oriented environments to study compositional generalization in world modeling. We (1) formalize the compositional generalization problem with an algebraic approach and (2) study how a world model can achieve that. We introduce a conceptual environment, Object Library, and two instances, and deploy a principled pipeline to measure the generalization ability. Motivated by the formulation, we analyze several methods with exact} or no compositional generalization ability using our framework, and design a differentiable approach, Homomorphic Object-oriented World Model (HOWM), that achieves approximate but more efficient compositional generalization.