 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDiverse Human Motion Prediction via Gumbel-Softmax Sampling from an Auxiliary Space
Jul 15, 2022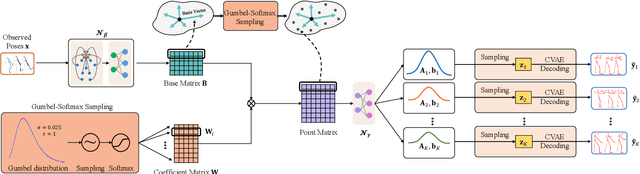
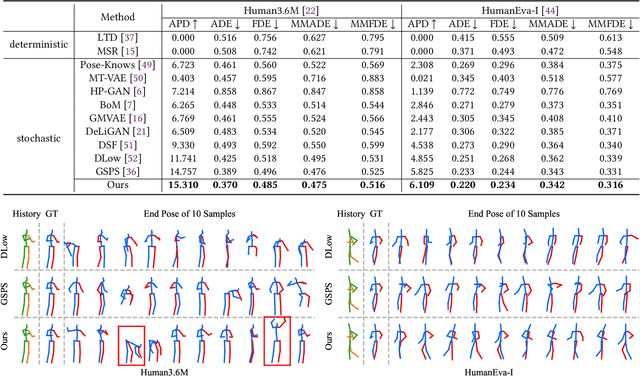
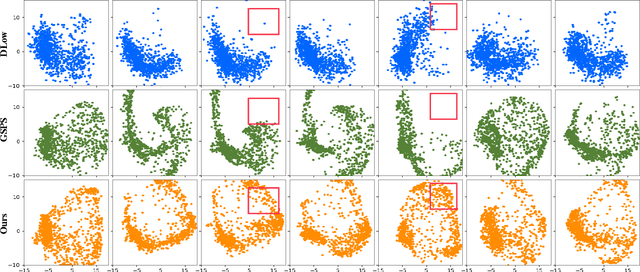
Diverse human motion prediction aims at predicting multiple possible future pose sequences from a sequence of observed poses. Previous approaches usually employ deep generative networks to model the conditional distribution of data, and then randomly sample outcomes from the distribution. While different results can be obtained, they are usually the most likely ones which are not diverse enough. Recent work explicitly learns multiple modes of the conditional distribution via a deterministic network, which however can only cover a fixed number of modes within a limited range. In this paper, we propose a novel sampling strategy for sampling very diverse results from an imbalanced multimodal distribution learned by a deep generative model. Our method works by generating an auxiliary space and smartly making randomly sampling from the auxiliary space equivalent to the diverse sampling from the target distribution. We propose a simple yet effective network architecture that implements this novel sampling strategy, which incorporates a Gumbel-Softmax coefficient matrix sampling method and an aggressive diversity promoting hinge loss function. Extensive experiments demonstrate that our method significantly improves both the diversity and accuracy of the samplings compared with previous state-of-the-art sampling approaches. Code and pre-trained models are available at https://github.com/Droliven/diverse_sampling.
MSR-GCN: Multi-Scale Residual Graph Convolution Networks for Human Motion Prediction
Aug 17, 2021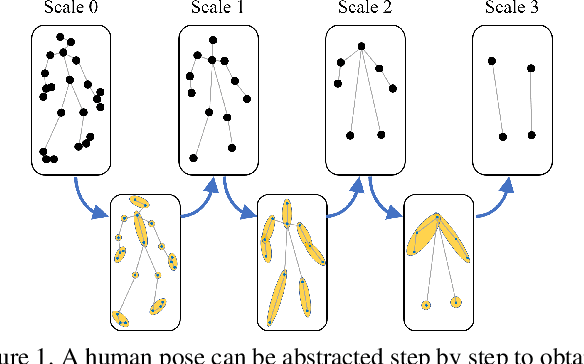
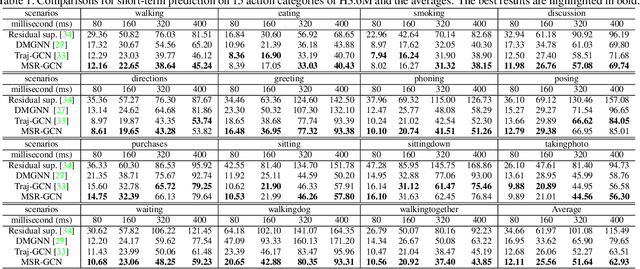
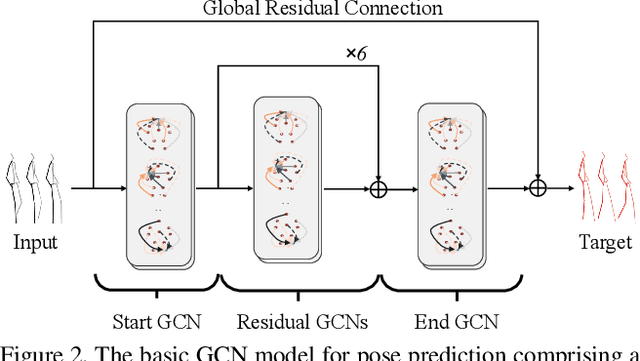
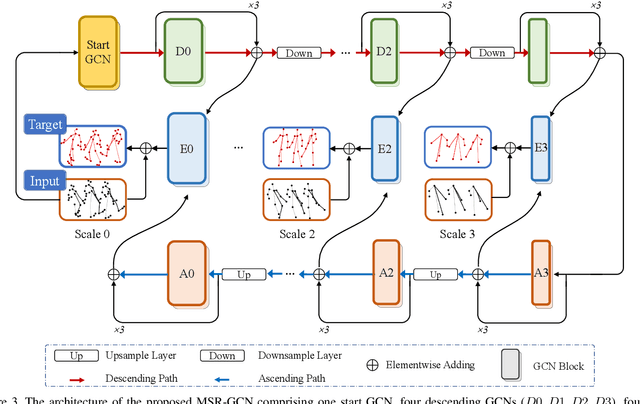
Human motion prediction is a challenging task due to the stochasticity and aperiodicity of future poses. Recently, graph convolutional network has been proven to be very effective to learn dynamic relations among pose joints, which is helpful for pose prediction. On the other hand, one can abstract a human pose recursively to obtain a set of poses at multiple scales. With the increase of the abstraction level, the motion of the pose becomes more stable, which benefits pose prediction too. In this paper, we propose a novel Multi-Scale Residual Graph Convolution Network (MSR-GCN) for human pose prediction task in the manner of end-to-end. The GCNs are used to extract features from fine to coarse scale and then from coarse to fine scale. The extracted features at each scale are then combined and decoded to obtain the residuals between the input and target poses. Intermediate supervisions are imposed on all the predicted poses, which enforces the network to learn more representative features. Our proposed approach is evaluated on two standard benchmark datasets, i.e., the Human3.6M dataset and the CMU Mocap dataset. Experimental results demonstrate that our method outperforms the state-of-the-art approaches. Code and pre-trained models are available at https://github.com/Droliven/MSRGCN.