Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeToward Scalable Verification for Safety-Critical Deep Networks
Feb 02, 2018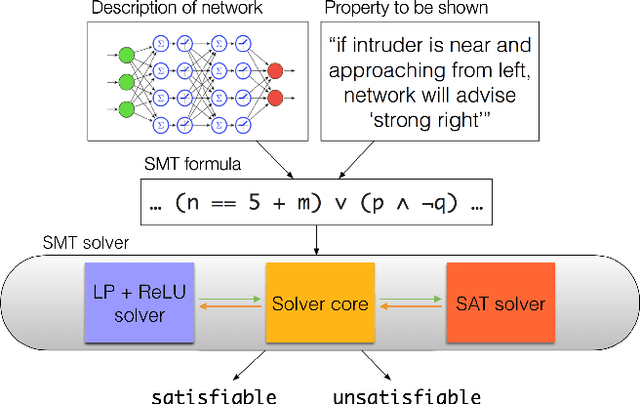
The increasing use of deep neural networks for safety-critical applications, such as autonomous driving and flight control, raises concerns about their safety and reliability. Formal verification can address these concerns by guaranteeing that a deep learning system operates as intended, but the state of the art is limited to small systems. In this work-in-progress report we give an overview of our work on mitigating this difficulty, by pursuing two complementary directions: devising scalable verification techniques, and identifying design choices that result in deep learning systems that are more amenable to verification.
* Accepted for presentation at SysML 2018
Via