 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReinforcement Learning for Follow-the-Leader Robotic Endoscopic Navigation via Synthetic Data
Jan 06, 2026Autonomous navigation is crucial for both medical and industrial endoscopic robots, enabling safe and efficient exploration of narrow tubular environments without continuous human intervention, where avoiding contact with the inner walls has been a longstanding challenge for prior approaches. We present a follow-the-leader endoscopic robot based on a flexible continuum structure designed to minimize contact between the endoscope body and intestinal walls, thereby reducing patient discomfort. To achieve this objective, we propose a vision-based deep reinforcement learning framework guided by monocular depth estimation. A realistic intestinal simulation environment was constructed in \textit{NVIDIA Omniverse} to train and evaluate autonomous navigation strategies. Furthermore, thousands of synthetic intraluminal images were generated using NVIDIA Replicator to fine-tune the Depth Anything model, enabling dense three-dimensional perception of the intestinal environment with a single monocular camera. Subsequently, we introduce a geometry-aware reward and penalty mechanism to enable accurate lumen tracking. Compared with the original Depth Anything model, our method improves $δ_{1}$ depth accuracy by 39.2% and reduces the navigation J-index by 0.67 relative to the second-best method, demonstrating the robustness and effectiveness of the proposed approach.
Towards Closing the Domain Gap with Event Cameras
Dec 18, 2025Although traditional cameras are the primary sensor for end-to-end driving, their performance suffers greatly when the conditions of the data they were trained on does not match the deployment environment, a problem known as the domain gap. In this work, we consider the day-night lighting difference domain gap. Instead of traditional cameras we propose event cameras as a potential alternative which can maintain performance across lighting condition domain gaps without requiring additional adjustments. Our results show that event cameras maintain more consistent performance across lighting conditions, exhibiting domain-shift penalties that are generally comparable to or smaller than grayscale frames and provide superior baseline performance in cross-domain scenarios.
JammingSnake: A follow-the-leader continuum robot with variable stiffness based on fiber jamming
Jan 05, 2025



Follow-the-leader (FTL) motion is essential for continuum robots operating in fragile and confined environments. It allows the robot to exert minimal force on its surroundings, reducing the risk of damage. This paper presents a novel design of a snake-like robot capable of achieving FTL motion by integrating fiber jamming modules (FJMs). The proposed robot can dynamically adjust its stiffness during propagation and interaction with the environment. An algorithm is developed to independently control the tendon and FJM insertion movements, allowing the robot to maintain its shape while minimizing the forces exerted on surrounding structures. To validate the proposed design, comparative tests were conducted between a traditional tendon-driven robot and the novel design under different configurations. The results demonstrate that our design relies significantly less on contact with the surroundings to maintain its shape. This highlights its potential for safer and more effective operations in delicate environments, such as minimally invasive surgery (MIS) or industrial in-situ inspection.
Effects of fiber number and density on fiber jamming: Towards follow-the-leader deployment of a continuum robot
Aug 24, 2024Fiber jamming modules (FJMs) offer flexibility and quick stiffness variation, making them suitable for follow-the-leader (FTL) motions in continuum robots, which is ideal for minimally invasive surgery (MIS). However, their potential has not been fully exploited, particularly in designing and manufacturing small-sized FJMs with high stiffness variation. Although existing research has focused on factors like fiber materials and geometry to maximize stiffness variation, the results often do not apply to FJMs for MIS due to size constraints. Meanwhile, other factors such as fiber number and packing density, less significant to large FJMs but critical to small-sized FJMs, have received insufficient investigation regarding their impact on the stiffness variation for FTL deployment. In this paper, we design and fabricate FJMs with a diameter of 4mm. Through theoretical and experimental analysis, we find that fiber number and packing density significantly affect both absolute stiffness and stiffness variation. Our experiments confirm the feasibility of using FJMs in a medical FTL robot design. The optimal configuration is a 4mm FJM with 0.4mm fibers at a 56% packing density, achieving up to 3400% stiffness variation. A video demonstration of a prototype robot using the suggested parameters for achieving FTL motions can be found at https://youtu.be/7pI5U0z7kcE.
A Low-Cost Teleoperable Surgical Robot with a Macro-Micro Structure and a Continuum Tip for Open-Source Research
May 25, 2024Surgical robotic systems equipped with microscale, high-dexterity manipulators have shown promising results in minimally invasive surgery (MIS). One barrier to the widespread adoption of such systems is the prohibitive cost of research and development efforts using current state-of-the-art equipment. To address this challenge, this paper proposes a low-cost and modifiable tendon-driven continuum manipulator for MIS applications. The device is capable of being teleoperated in conjunction with a macro-scale six-axis robotic arm using a haptic stylus. Its control software incorporates and extends freely available and open-source software packages. For verification, we perform teleoperation trials on the proposed continuum manipulator using an electromagnetic tracker. We then integrate the manipulator with a UR5e robotic arm. A series of simulated tumour biopsies were conducted using the integrated robotic system and an anatomical model (phantom), validating its potential efficacy in MIS applications. The complete source code, CAD files for all additively manufactured components, a parts list for the manipulator, and a demonstration video of the proposed system are made available in this work.
Analysis of Fatigue-Induced Compensatory Movements in Bicep Curls: Gaining Insights for the Deployment of Wearable Sensors
Feb 18, 2024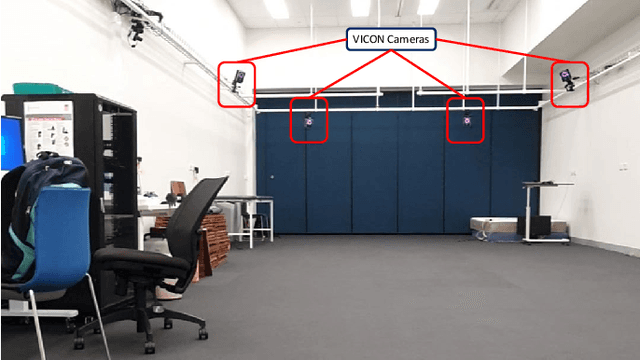
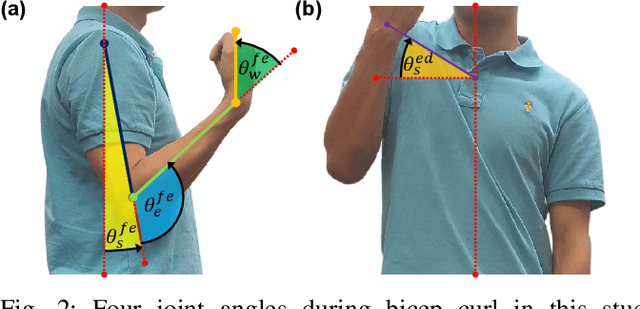
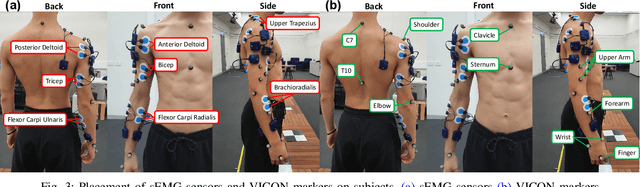
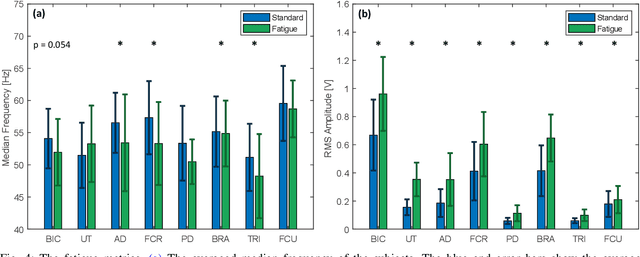
A common challenge in Bicep Curls rehabilitation is muscle compensation, where patients adopt alternative movement patterns when the primary muscle group cannot act due to injury or fatigue, significantly decreasing the effectiveness of rehabilitation efforts. The problem is exacerbated by the growing trend toward transitioning from in-clinic to home-based rehabilitation, where constant monitoring and correction by physiotherapists are limited. To address this challenge, developing wearable sensors capable of detecting muscle compensation becomes crucial. This study aims to gain insights for the optimal deployment of wearable sensors through a comprehensive study of muscle compensation in Bicep Curls. We collect upper limb joint kinematics and surface electromyography signals (sEMG) from eight muscles in 12 healthy subjects during standard and fatigue stages. Two muscle synergies are derived from sEMG signals and are analyzed comprehensively along with joint kinematics. Our findings reveal a shift in the relative contribution of forearm muscles to shoulder muscles, accompanied by a significant increase in activation amplitude for both synergies. Additionally, more pronounced movement was observed at the shoulder joint during fatigue. These results suggest focusing on the should muscle activities and joint motions when deploying wearable sensors for effective detection of compensatory movements.
A Mechatronic System for the Visualisation and Analysis of Orchestral Conducting
Jan 28, 2024This paper quantitatively analysed orchestral conducting patterns, and detected variations as a result of extraneous body movement during conducting, in the first experiment of its kind. A novel live conducting system featuring data capture, processing, and analysis was developed. Reliable data of an expert conductor's movements was collected, processed, and used to calculate average trajectories for different conducting techniques with various extraneous body movements; variations between extraneous body movement techniques and controlled technique were definitively determined in a novel quantitative analysis. A portable and affordable mechatronic system was created to capture and process live baton tip data, and was found to be accurate through calibration against a reliable reference. Experimental conducting field data was captured through the mechatronic system, and analysed against previously calculated average trajectories; the extraneous movement used during the field data capture was successfully identified by the system.
* 10 pages, 10 figures, accepted by ACRA2023
Automatic Tissue Traction with Haptics-Enabled Forceps for Minimally Invasive Surgery
Jan 25, 2024A common limitation of autonomous tissue manipulation in robotic minimally invasive surgery (MIS) is the absence of force sensing and control at the tool level. Recently, our team has developed haptics-enabled forceps that can simultaneously measure the grasping and pulling forces during tissue manipulation. Based on this design, here we further present a method to automate tissue traction with controlled grasping and pulling forces. Specifically, the grasping stage relies on a controlled grasping force, while the pulling stage is under the guidance of a controlled pulling force. Notably, during the pulling process, the simultaneous control of both grasping and pulling forces is also enabled for more precise tissue traction, achieved through force decoupling. The force controller is built upon a static model of tissue manipulation, considering the interaction between the haptics-enabled forceps and soft tissue. The efficacy of this force control approach is validated through a series of experiments comparing targeted, estimated, and actual reference forces. To verify the feasibility of the proposed method in surgical applications, various tissue resections are conducted on ex vivo tissues employing a dual-arm robotic setup. Finally, we discuss the benefits of multi-force control in tissue traction, evidenced through comparative analyses of various ex vivo tissue resections. The results affirm the feasibility of implementing automatic tissue traction using micro-sized forceps with multi-force control, suggesting its potential to promote autonomous MIS. A video demonstrating the experiments can be found at https://youtu.be/8fe8o8IFrjE.
Haptics-Enabled Forceps with Multi-Modal Force Sensing: Towards Task-Autonomous Robotic Surgery
Mar 15, 2023



Current minimally invasive surgical robots are lacking in force sensing that is robust to temperature and electromagnetic variation while being compatible with micro-sized instruments. This paper presents a multi-axis force sensing module that can be integrated with micro-sized surgical instruments such as biopsy forceps. The proposed miniature sensing module mainly consists of a flexure, a camera, and a target. The deformation of the flexure is obtained by the pose variation of the top-mounted target, which is estimated by the camera with a proposed pose estimation algorithm. Then, the external force is estimated using the flexure's displacement and stiffness matrix. Integrating the sensing module, we further develop a pair of haptics-enabled forceps and realize its multi-modal force sensing, including touching, grasping, and pulling when the forceps manipulate tissues. To minimize the unexpected sliding between the forceps' clips and the tissue, we design a micro-level actuator to drive the forceps and compensate for the motion introduced by the flexure's deformation. Finally, a series of experiments are conducted to verify the feasibility of the proposed sensing module and forceps, including an automatic robotic grasping procedure on ex-vivo tissues. The results indicate the sensing module can estimate external forces accurately, and the haptics-enabled forceps can potentially realize multi-modal force sensing for task-autonomous robotic surgery. A video demonstrating the experiments can be found at https://youtu.be/4UUTT_hiFcI.
Camera Frame Misalignment in a Teleoperated Eye-in-Hand Robot: Effects and a Simple Correction Method
May 18, 2021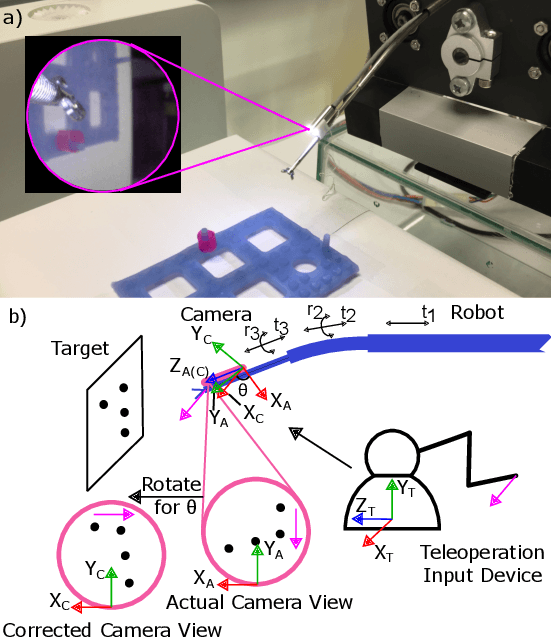
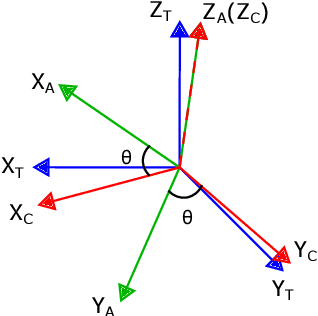
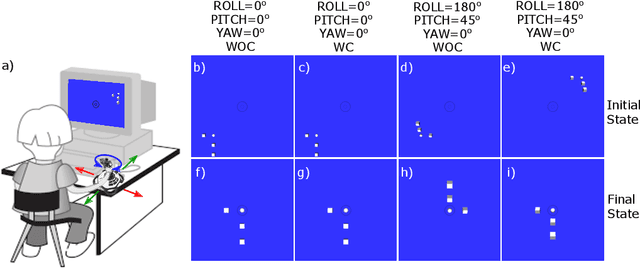
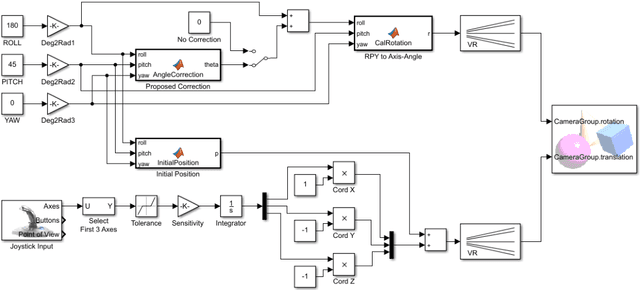
Misalignment between the camera frame and the operator frame is commonly seen in a teleoperated system and usually degrades the operation performance. The effects of such misalignment have not been fully investigated for eye-in-hand systems - systems that have the camera (eye) mounted to the end-effector (hand) to gain compactness in confined spaces such as in endoscopic surgery. This paper provides a systematic study on the effects of the camera frame misalignment in a teleoperated eye-in-hand robot and proposes a simple correction method in the view display. A simulation is designed to compare the effects of the misalignment under different conditions. Users are asked to move a rigid body from its initial position to the specified target position via teleoperation, with different levels of misalignment simulated. It is found that misalignment between the input motion and the output view is much more difficult to compensate by the operators when it is in the orthogonal direction (~40s) compared with the opposite direction (~20s). An experiment on a real concentric tube robot with an eye-in-hand configuration is also conducted. Users are asked to telemanipulate the robot to complete a pick-and-place task. Results show that with the correction enabled, there is a significant improvement in the operation performance in terms of completion time (mean 40.6%, median 38.6%), trajectory length (mean 34.3%, median 28.1%), difficulty (50.5%), unsteadiness (49.4%), and mental stress (60.9%).