 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFast Functionally Redundant Inverse Kinematics for Robotic Toolpath Optimisation in Manufacturing Tasks
Dec 10, 2025Industrial automation with six-axis robotic arms is critical for many manufacturing tasks, including welding and additive manufacturing applications; however, many of these operations are functionally redundant due to the symmetrical tool axis, which effectively makes the operation a five-axis task. Exploiting this redundancy is crucial for achieving the desired workspace and dexterity required for the feasibility and optimisation of toolpath planning. Inverse kinematics algorithms can solve this in a fast, reactive framework, but these techniques are underutilised over the more computationally expensive offline planning methods. We propose a novel algorithm to solve functionally redundant inverse kinematics for robotic manipulation utilising a task space decomposition approach, the damped least-squares method and Halley's method to achieve fast and robust solutions with reduced joint motion. We evaluate our methodology in the case of toolpath optimisation in a cold spray coating application on a non-planar surface. The functionally redundant inverse kinematics algorithm can quickly solve motion plans that minimise joint motion, expanding the feasible operating space of the complex toolpath. We validate our approach on an industrial ABB manipulator and cold-spray gun executing the computed toolpath.
Optimal Dexterity for a Snake-like Surgical Manipulator using Patient-specific Task-space Constraints in a Computational Design Algorithm
Mar 06, 2019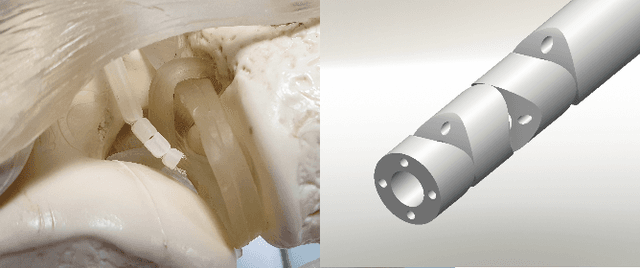
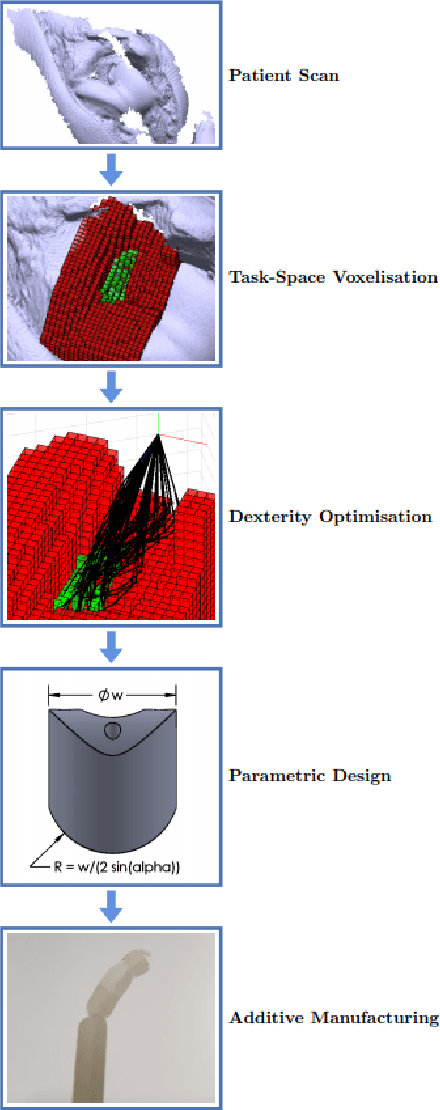
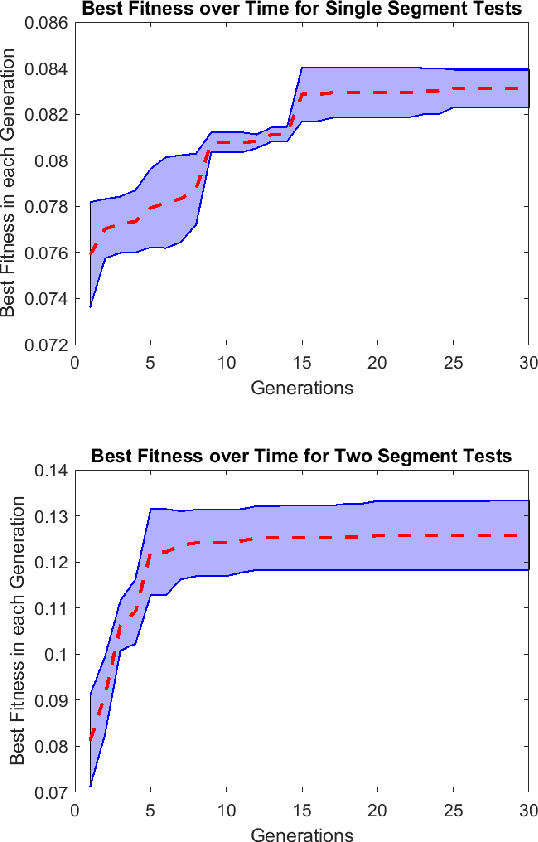
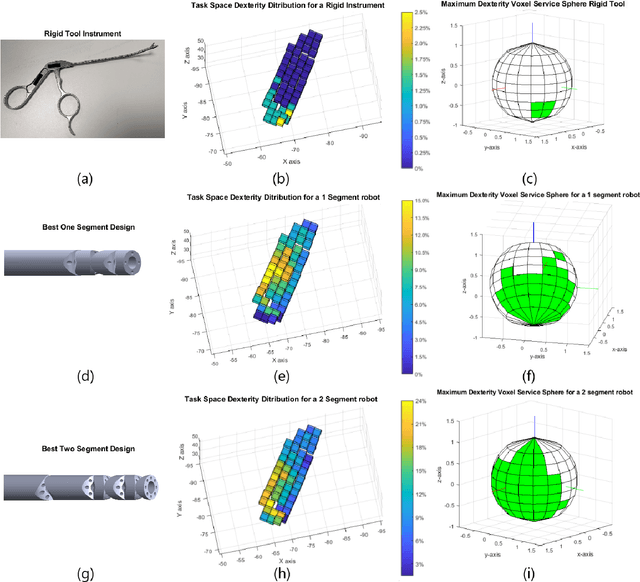
Tendon-driven snake-like arms have been used to create highly dexterous continuum robots so that they can bend around anatomical obstacles to access clinical targets. In this paper, we propose a design algorithm for developing patient-specific surgical continuum manipulators optimized for oriental dexterity constrained by task-space obstacles. The algorithm uses a sampling-based approach to finding the dexterity distribution in the workspace discretized by voxels. The oriental dexterity measured in the region of interest in the task-space formed a fitness function to be optimized through differential evolution. This was implemented in the design of a tendon-driven manipulator for knee arthroscopy. The results showed a feasible design that achieves significantly better dexterity than a rigid tool. This highlights the potential of the proposed method to be used in the process of designing dexterous surgical manipulators in the field.