 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutonomous Driving Strategies at Intersections: Scenarios, State-of-the-Art, and Future Outlooks
Jul 13, 2021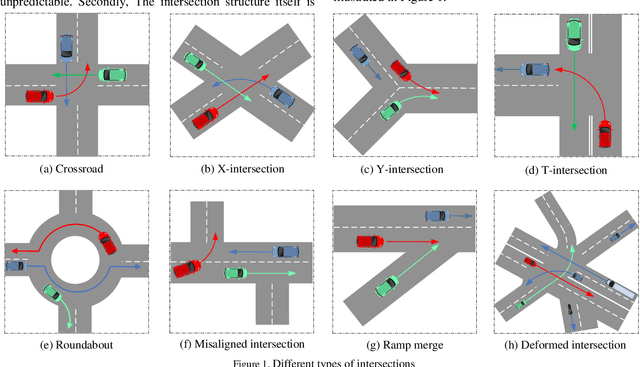
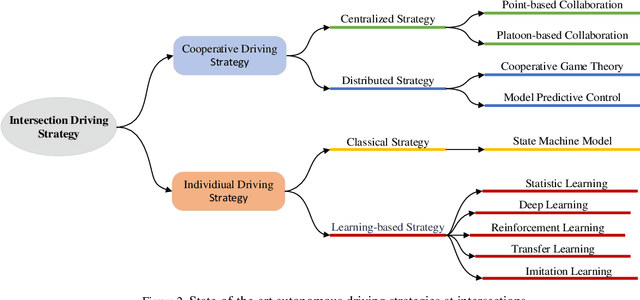
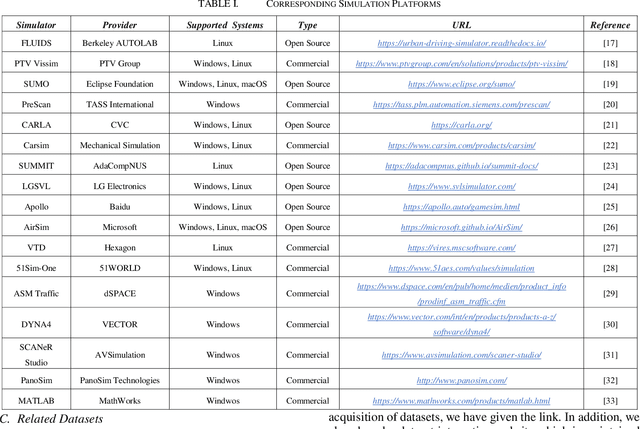
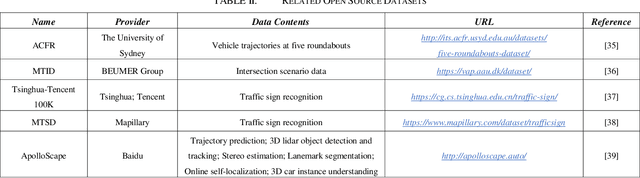
Due to the complex and dynamic character of intersection scenarios, the autonomous driving strategy at intersections has been a difficult problem and a hot point in the research of intelligent transportation systems in recent years. This paper gives a brief summary of state-of-the-art autonomous driving strategies at intersections. Firstly, we enumerate and analyze common types of intersection scenarios, corresponding simulation platforms, as well as related datasets. Secondly, by reviewing previous studies, we have summarized characteristics of existing autonomous driving strategies and classified them into several categories. Finally, we point out problems of the existing autonomous driving strategies and put forward several valuable research outlooks.
Driver Behavior Modelling at the Urban Intersection via Canonical Correlation Analysis
Jul 11, 2020The urban intersection is a typically dynamic and complex scenario for intelligent vehicles, which exists a variety of driving behaviors and traffic participants. Accurately modelling the driver behavior at the intersection is essential for intelligent transportation systems (ITS). Previous researches mainly focus on using attention mechanism to model the degree of correlation. In this research, a canonical correlation analysis (CCA)-based framework is proposed. The value of canonical correlation is used for feature selection. Gaussian mixture model and Gaussian process regression are applied for driver behavior modelling. Two experiments using simulated and naturalistic driving data are designed for verification. Experimental results are consistent with the driver's judgment. Comparative studies show that the proposed framework can obtain a better performance.