 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCAPT: Category-level Articulation Estimation from a Single Point Cloud Using Transformer
Feb 27, 2024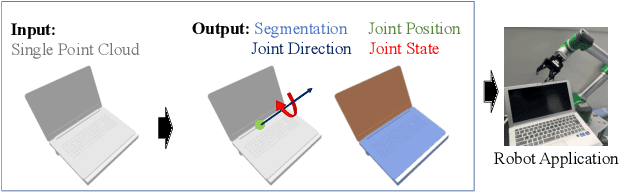
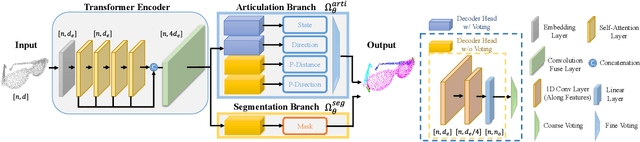
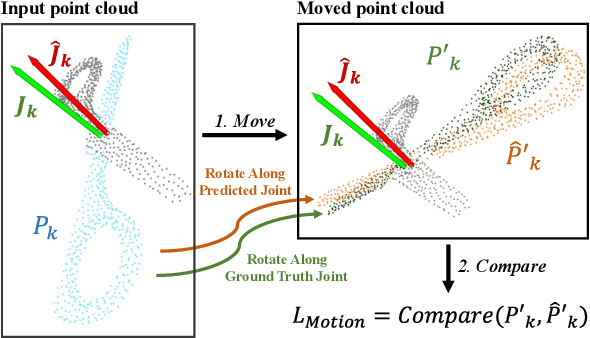
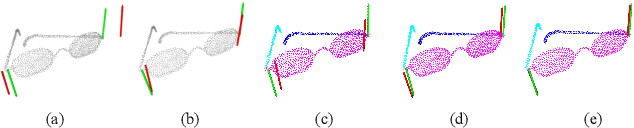
The ability to estimate joint parameters is essential for various applications in robotics and computer vision. In this paper, we propose CAPT: category-level articulation estimation from a point cloud using Transformer. CAPT uses an end-to-end transformer-based architecture for joint parameter and state estimation of articulated objects from a single point cloud. The proposed CAPT methods accurately estimate joint parameters and states for various articulated objects with high precision and robustness. The paper also introduces a motion loss approach, which improves articulation estimation performance by emphasizing the dynamic features of articulated objects. Additionally, the paper presents a double voting strategy to provide the framework with coarse-to-fine parameter estimation. Experimental results on several category datasets demonstrate that our methods outperform existing alternatives for articulation estimation. Our research provides a promising solution for applying Transformer-based architectures in articulated object analysis.
Fast and Robust Bin-picking System for Densely Piled Industrial Objects
Dec 04, 2020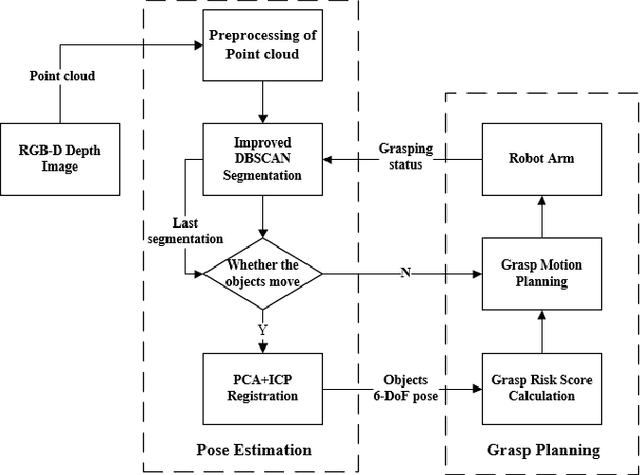
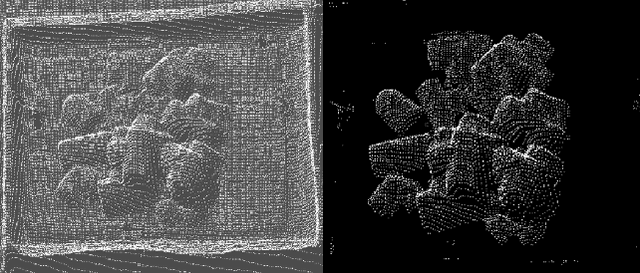
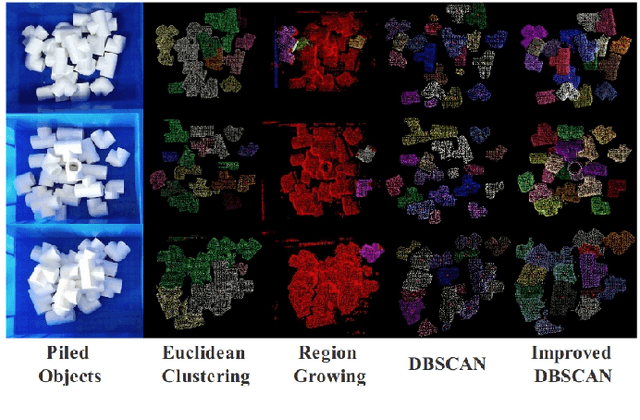
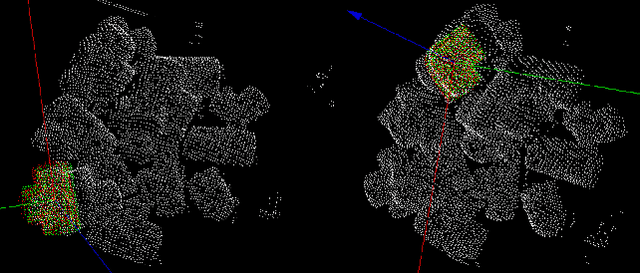
Objects grasping, also known as the bin-picking, is one of the most common tasks faced by industrial robots. While much work has been done in related topics, grasping randomly piled objects still remains a challenge because much of the existing work either lack robustness or costs too much resource. In this paper, we develop a fast and robust bin-picking system for grasping densely piled objects adaptively and safely. The proposed system starts with point cloud segmentation using improved density-based spatial clustering of application with noise (DBSCAN) algorithm, which is improved by combining the region growing algorithm and using Octree to speed up the calculation. The system then uses principle component analysis (PCA) for coarse registration and iterative closest point (ICP) for fine registration. We propose a grasp risk score (GRS) to evaluate each object by the collision probability, the stability of the object, and the whole pile's stability. Through real tests with the Anno robot, our method is verified to be advanced in speed and robustness.