 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeScalable Importance Sampling in High Dimensions with Low-Rank Mixture Proposals
May 19, 2025Importance sampling is a Monte Carlo technique for efficiently estimating the likelihood of rare events by biasing the sampling distribution towards the rare event of interest. By drawing weighted samples from a learned proposal distribution, importance sampling allows for more sample-efficient estimation of rare events or tails of distributions. A common choice of proposal density is a Gaussian mixture model (GMM). However, estimating full-rank GMM covariance matrices in high dimensions is a challenging task due to numerical instabilities. In this work, we propose using mixtures of probabilistic principal component analyzers (MPPCA) as the parametric proposal density for importance sampling methods. MPPCA models are a type of low-rank mixture model that can be fit quickly using expectation-maximization, even in high-dimensional spaces. We validate our method on three simulated systems, demonstrating consistent gains in sample efficiency and quality of failure distribution characterization.
Enhanced Importance Sampling through Latent Space Exploration in Normalizing Flows
Jan 06, 2025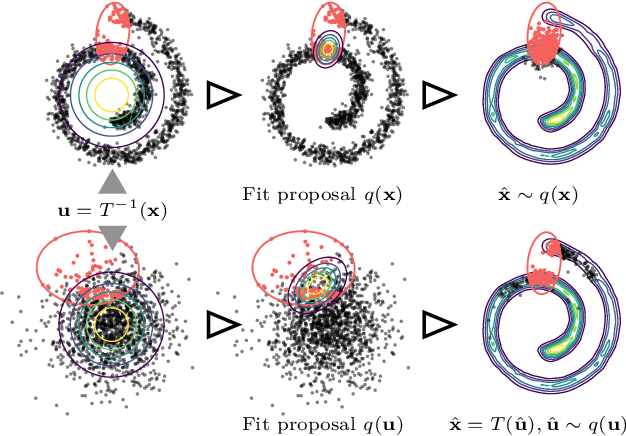
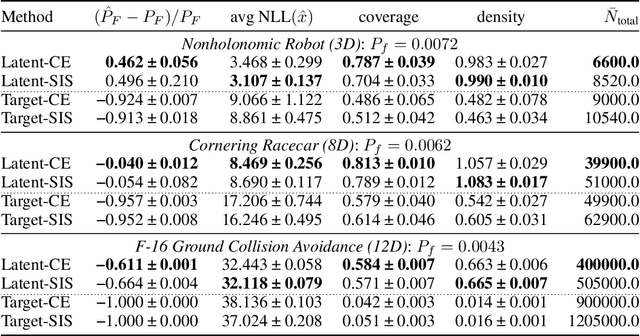
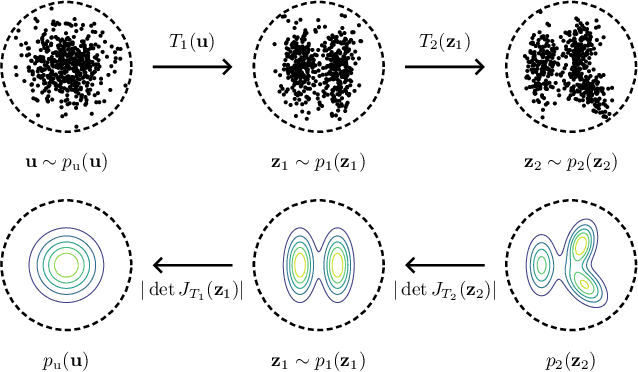
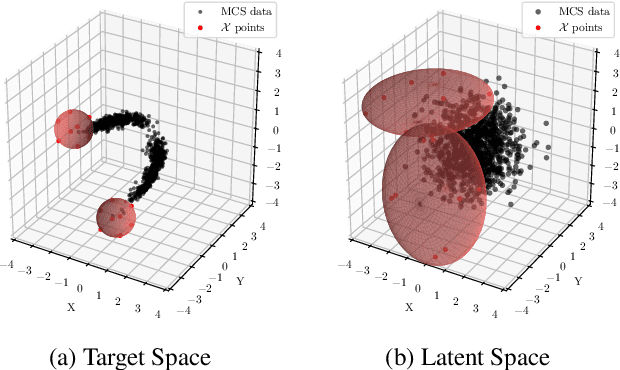
Importance sampling is a rare event simulation technique used in Monte Carlo simulations to bias the sampling distribution towards the rare event of interest. By assigning appropriate weights to sampled points, importance sampling allows for more efficient estimation of rare events or tails of distributions. However, importance sampling can fail when the proposal distribution does not effectively cover the target distribution. In this work, we propose a method for more efficient sampling by updating the proposal distribution in the latent space of a normalizing flow. Normalizing flows learn an invertible mapping from a target distribution to a simpler latent distribution. The latent space can be more easily explored during the search for a proposal distribution, and samples from the proposal distribution are recovered in the space of the target distribution via the invertible mapping. We empirically validate our methodology on simulated robotics applications such as autonomous racing and aircraft ground collision avoidance.
Discrete-Time Distribution Steering using Monte Carlo Tree Search
Dec 09, 2024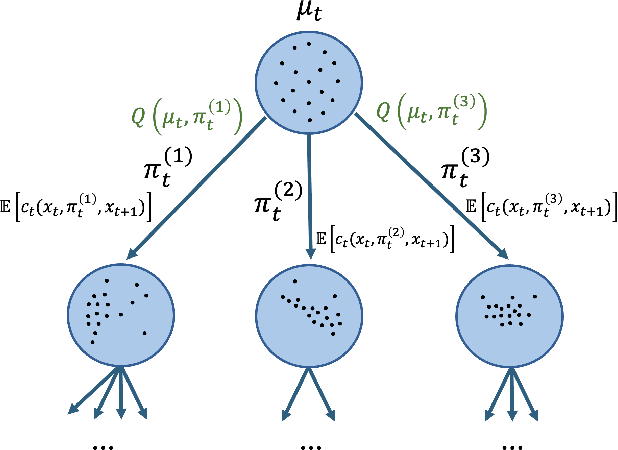
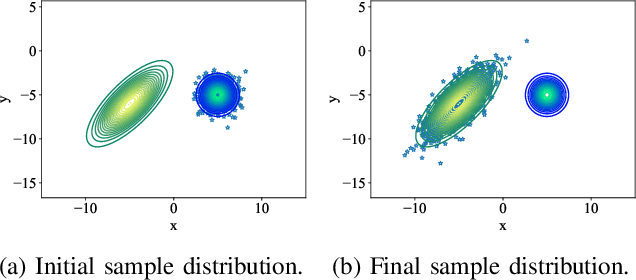
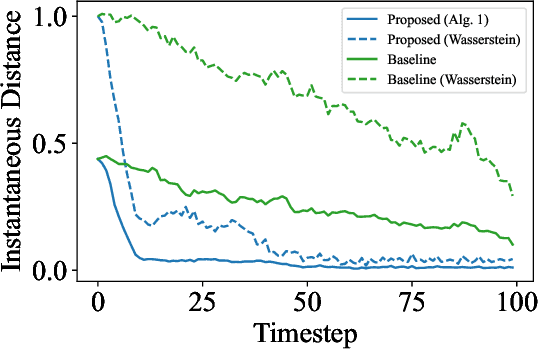
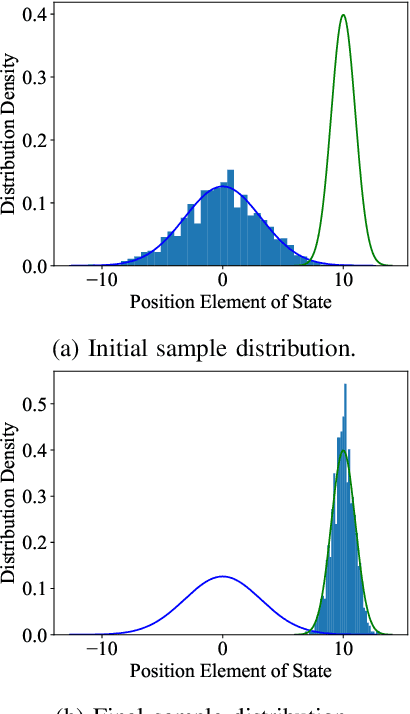
Optimal control problems with state distribution constraints have attracted interest for their expressivity, but solutions rely on linear approximations. We approach the problem of driving the state of a dynamical system in distribution from a sequential decision-making perspective. We formulate the optimal control problem as an appropriate Markov decision process (MDP), where the actions correspond to the state-feedback control policies. We then solve the MDP using Monte Carlo tree search (MCTS). This renders our method suitable for any dynamics model. A key component of our approach is a novel, easy to compute, distance metric in the distribution space that allows our algorithm to guide the distribution of the state. We experimentally test our algorithm under both linear and nonlinear dynamics.
Deep Normalizing Flows for State Estimation
Jun 27, 2023



Safe and reliable state estimation techniques are a critical component of next-generation robotic systems. Agents in such systems must be able to reason about the intentions and trajectories of other agents for safe and efficient motion planning. However, classical state estimation techniques such as Gaussian filters often lack the expressive power to represent complex underlying distributions, especially if the system dynamics are highly nonlinear or if the interaction outcomes are multi-modal. In this work, we use normalizing flows to learn an expressive representation of the belief over an agent's true state. Furthermore, we improve upon existing architectures for normalizing flows by using more expressive deep neural network architectures to parameterize the flow. We evaluate our method on two robotic state estimation tasks and show that our approach outperforms both classical and modern deep learning-based state estimation baselines.
Uncertainty-Aware Online Merge Planning with Learned Driver Behavior
Jul 11, 2022
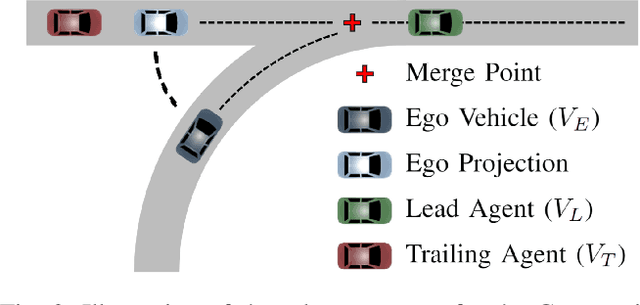
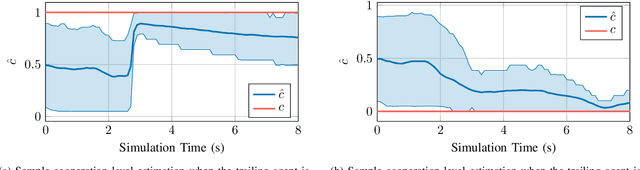
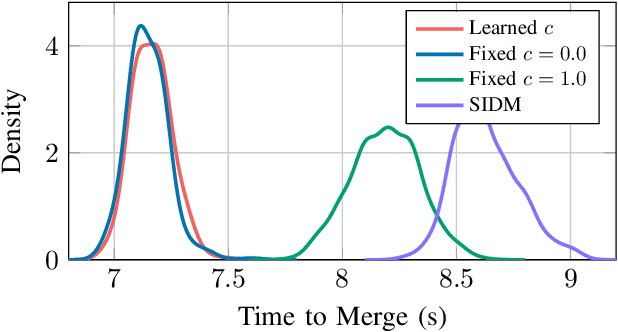
Safe and reliable autonomy solutions are a critical component of next-generation intelligent transportation systems. Autonomous vehicles in such systems must reason about complex and dynamic driving scenes in real time and anticipate the behavior of nearby drivers. Human driving behavior is highly nuanced and specific to individual traffic participants. For example, drivers might display cooperative or non-cooperative behaviors in the presence of merging vehicles. These behaviors must be estimated and incorporated in the planning process for safe and efficient driving. In this work, we present a framework for estimating the cooperation level of drivers on a freeway and plan merging maneuvers with the drivers' latent behaviors explicitly modeled. The latent parameter estimation problem is solved using a particle filter to approximate the probability distribution over the cooperation level. A partially observable Markov decision process (POMDP) that includes the latent state estimate is solved online to extract a policy for a merging vehicle. We evaluate our method in a high-fidelity automotive simulator against methods that are agnostic to latent states or rely on $\textit{a priori}$ assumptions about actor behavior.
Dyadic Sex Composition and Task Classification Using fNIRS Hyperscanning Data
Dec 07, 2021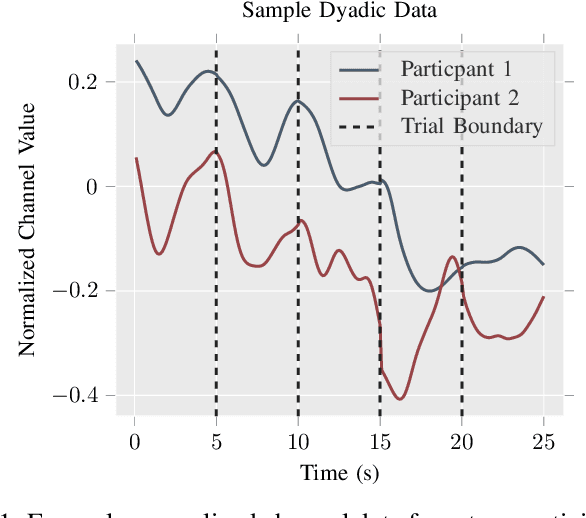


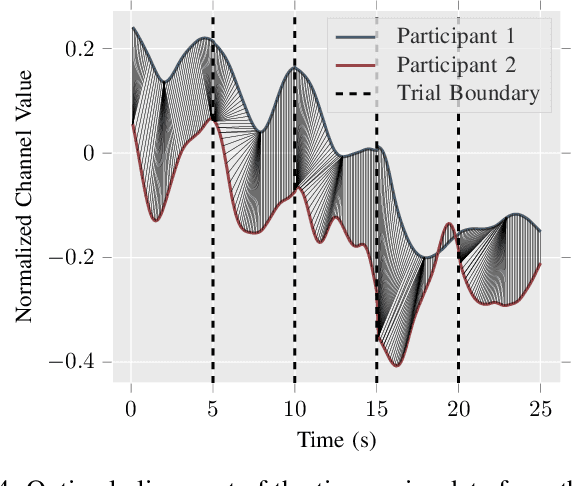
Hyperscanning with functional near-infrared spectroscopy (fNIRS) is an emerging neuroimaging application that measures the nuanced neural signatures underlying social interactions. Researchers have assessed the effect of sex and task type (e.g., cooperation versus competition) on inter-brain coherence during human-to-human interactions. However, no work has yet used deep learning-based approaches to extract insights into sex and task-based differences in an fNIRS hyperscanning context. This work proposes a convolutional neural network-based approach to dyadic sex composition and task classification for an extensive hyperscanning dataset with $N = 222$ participants. Inter-brain signal similarity computed using dynamic time warping is used as the input data. The proposed approach achieves a maximum classification accuracy of greater than $80$ percent, thereby providing a new avenue for exploring and understanding complex brain behavior.