 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHDR Imaging for Dynamic Scenes with Events
Apr 04, 2024


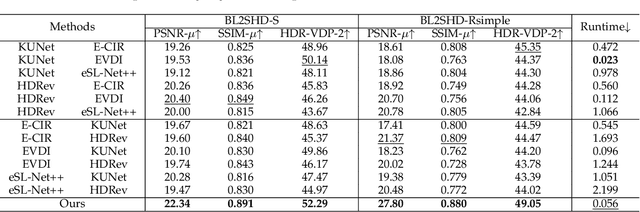
High dynamic range imaging (HDRI) for real-world dynamic scenes is challenging because moving objects may lead to hybrid degradation of low dynamic range and motion blur. Existing event-based approaches only focus on a separate task, while cascading HDRI and motion deblurring would lead to sub-optimal solutions, and unavailable ground-truth sharp HDR images aggravate the predicament. To address these challenges, we propose an Event-based HDRI framework within a Self-supervised learning paradigm, i.e., Self-EHDRI, which generalizes HDRI performance in real-world dynamic scenarios. Specifically, a self-supervised learning strategy is carried out by learning cross-domain conversions from blurry LDR images to sharp LDR images, which enables sharp HDR images to be accessible in the intermediate process even though ground-truth sharp HDR images are missing. Then, we formulate the event-based HDRI and motion deblurring model and conduct a unified network to recover the intermediate sharp HDR results, where both the high dynamic range and high temporal resolution of events are leveraged simultaneously for compensation. We construct large-scale synthetic and real-world datasets to evaluate the effectiveness of our method. Comprehensive experiments demonstrate that the proposed Self-EHDRI outperforms state-of-the-art approaches by a large margin. The codes, datasets, and results are available at https://lxp-whu.github.io/Self-EHDRI.
Automatic detection of aerial survey ground control points based on Yolov5-OBB
Mar 06, 2023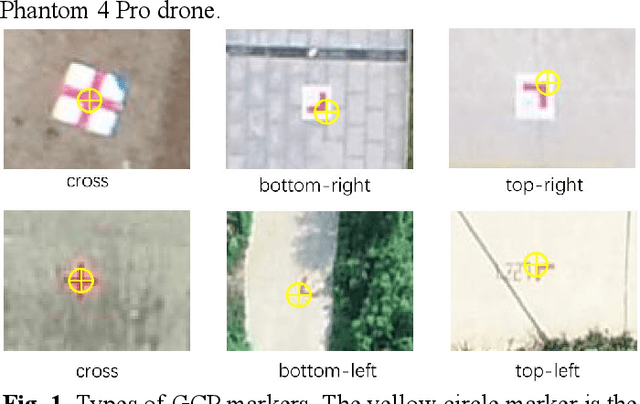

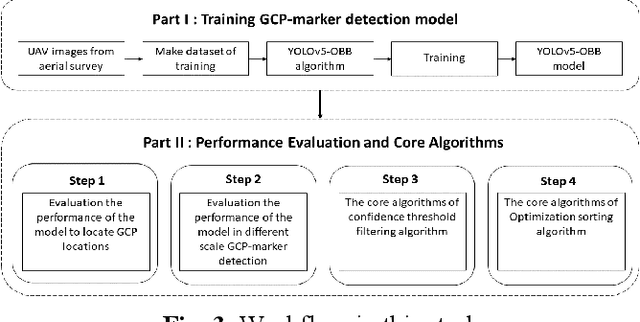
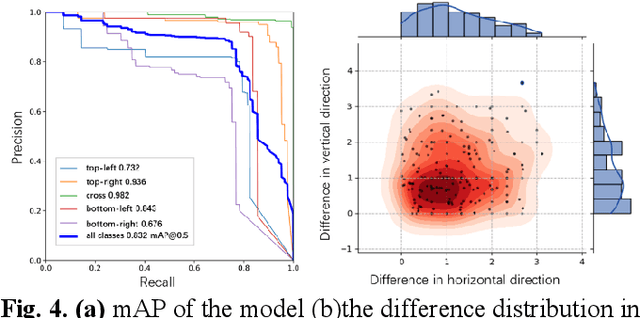
The use of ground control points (GCPs) for georeferencing is the most common strategy in unmanned aerial vehicle (UAV) photogrammetry, but at the same time their collection represents the most time-consuming and expensive part of UAV campaigns. Recently, deep learning has been rapidly developed in the field of small object detection. In this letter, to automatically extract coordinates information of ground control points (GCPs) by detecting GCP-markers in UAV images, we propose a solution that uses a deep learning-based architecture, YOLOv5-OBB, combined with a confidence threshold filtering algorithm and an optimal ranking algorithm. We applied our proposed method to a dataset collected by DJI Phantom 4 Pro drone and obtained good detection performance with the mean Average Precision (AP) of 0.832 and the highest AP of 0.982 for the cross-type GCP-markers. The proposed method can be a promising tool for future implementation of the end-to-end aerial triangulation process.