 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGeneral Flexible $f$-divergence for Challenging Offline RL Datasets with Low Stochasticity and Diverse Behavior Policies
Feb 11, 2026Offline RL algorithms aim to improve upon the behavior policy that produces the collected data while constraining the learned policy to be within the support of the dataset. However, practical offline datasets often contain examples with little diversity or limited exploration of the environment, and from multiple behavior policies with diverse expertise levels. Limited exploration can impair the offline RL algorithm's ability to estimate \textit{Q} or \textit{V} values, while constraining towards diverse behavior policies can be overly conservative. Such datasets call for a balance between the RL objective and behavior policy constraints. We first identify the connection between $f$-divergence and optimization constraint on the Bellman residual through a more general Linear Programming form for RL and the convex conjugate. Following this, we introduce the general flexible function formulation for the $f$-divergence to incorporate an adaptive constraint on algorithms' learning objectives based on the offline training dataset. Results from experiments on the MuJoCo, Fetch, and AdroitHand environments show the correctness of the proposed LP form and the potential of the flexible $f$-divergence in improving performance for learning from a challenging dataset when applied to a compatible constrained optimization algorithm.
Action-Dependent Optimality-Preserving Reward Shaping
May 19, 2025Recent RL research has utilized reward shaping--particularly complex shaping rewards such as intrinsic motivation (IM)--to encourage agent exploration in sparse-reward environments. While often effective, ``reward hacking'' can lead to the shaping reward being optimized at the expense of the extrinsic reward, resulting in a suboptimal policy. Potential-Based Reward Shaping (PBRS) techniques such as Generalized Reward Matching (GRM) and Policy-Invariant Explicit Shaping (PIES) have mitigated this. These methods allow for implementing IM without altering optimal policies. In this work we show that they are effectively unsuitable for complex, exploration-heavy environments with long-duration episodes. To remedy this, we introduce Action-Dependent Optimality Preserving Shaping (ADOPS), a method of converting intrinsic rewards to an optimality-preserving form that allows agents to utilize IM more effectively in the extremely sparse environment of Montezuma's Revenge. We also prove ADOPS accommodates reward shaping functions that cannot be written in a potential-based form: while PBRS-based methods require the cumulative discounted intrinsic return be independent of actions, ADOPS allows for intrinsic cumulative returns to be dependent on agents' actions while still preserving the optimal policy set. We show how action-dependence enables ADOPS's to preserve optimality while learning in complex, sparse-reward environments where other methods struggle.
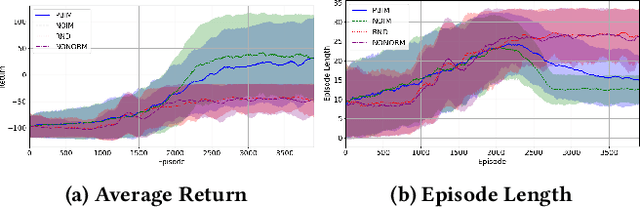
Potential-Based Intrinsic Motivation: Preserving Optimality With Complex, Non-Markovian Shaping Rewards
Oct 16, 2024



Recently there has been a proliferation of intrinsic motivation (IM) reward-shaping methods to learn in complex and sparse-reward environments. These methods can often inadvertently change the set of optimal policies in an environment, leading to suboptimal behavior. Previous work on mitigating the risks of reward shaping, particularly through potential-based reward shaping (PBRS), has not been applicable to many IM methods, as they are often complex, trainable functions themselves, and therefore dependent on a wider set of variables than the traditional reward functions that PBRS was developed for. We present an extension to PBRS that we prove preserves the set of optimal policies under a more general set of functions than has been previously proven. We also present {\em Potential-Based Intrinsic Motivation} (PBIM) and {\em Generalized Reward Matching} (GRM), methods for converting IM rewards into a potential-based form that are useable without altering the set of optimal policies. Testing in the MiniGrid DoorKey and Cliff Walking environments, we demonstrate that PBIM and GRM successfully prevent the agent from converging to a suboptimal policy and can speed up training. Additionally, we prove that GRM is sufficiently general as to encompass all potential-based reward shaping functions. This paper expands on previous work introducing the PBIM method, and provides an extension to the more general method of GRM, as well as additional proofs, experimental results, and discussion.
Potential-Based Reward Shaping For Intrinsic Motivation
Feb 12, 2024


Recently there has been a proliferation of intrinsic motivation (IM) reward-shaping methods to learn in complex and sparse-reward environments. These methods can often inadvertently change the set of optimal policies in an environment, leading to suboptimal behavior. Previous work on mitigating the risks of reward shaping, particularly through potential-based reward shaping (PBRS), has not been applicable to many IM methods, as they are often complex, trainable functions themselves, and therefore dependent on a wider set of variables than the traditional reward functions that PBRS was developed for. We present an extension to PBRS that we prove preserves the set of optimal policies under a more general set of functions than has been previously proven. We also present {\em Potential-Based Intrinsic Motivation} (PBIM), a method for converting IM rewards into a potential-based form that is useable without altering the set of optimal policies. Testing in the MiniGrid DoorKey and Cliff Walking environments, we demonstrate that PBIM successfully prevents the agent from converging to a suboptimal policy and can speed up training.
Modeling Risk in Reinforcement Learning: A Literature Mapping
Dec 08, 2023



Safe reinforcement learning deals with mitigating or avoiding unsafe situations by reinforcement learning (RL) agents. Safe RL approaches are based on specific risk representations for particular problems or domains. In order to analyze agent behaviors, compare safe RL approaches, and effectively transfer techniques between application domains, it is necessary to understand the types of risk specific to safe RL problems. We performed a systematic literature mapping with the objective to characterize risk in safe RL. Based on the obtained results, we present definitions, characteristics, and types of risk that hold on multiple application domains. Our literature mapping covers literature from the last 5 years (2017-2022), from a variety of knowledge areas (AI, finance, engineering, medicine) where RL approaches emphasize risk representation and management. Our mapping covers 72 papers filtered systematically from over thousands of papers on the topic. Our proposed notion of risk covers a variety of representations, disciplinary differences, common training exercises, and types of techniques. We encourage researchers to include explicit and detailed accounts of risk in future safe RL research reports, using this mapping as a starting point. With this information, researchers and practitioners could draw stronger conclusions on the effectiveness of techniques on different problems.