 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFact Probability Vector Based Goal Recognition
Aug 26, 2024



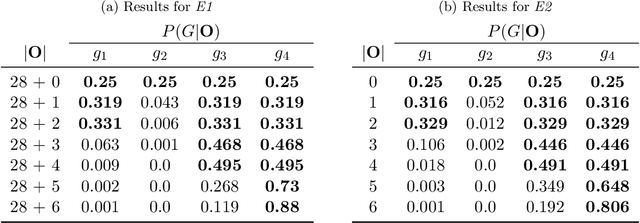
We present a new approach to goal recognition that involves comparing observed facts with their expected probabilities. These probabilities depend on a specified goal g and initial state s0. Our method maps these probabilities and observed facts into a real vector space to compute heuristic values for potential goals. These values estimate the likelihood of a given goal being the true objective of the observed agent. As obtaining exact expected probabilities for observed facts in an observation sequence is often practically infeasible, we propose and empirically validate a method for approximating these probabilities. Our empirical results show that the proposed approach offers improved goal recognition precision compared to state-of-the-art techniques while reducing computational complexity.
Planning Landmark Based Goal Recognition Revisited: Does Using Initial State Landmarks Make Sense?
Jun 27, 2023Goal recognition is an important problem in many application domains (e.g., pervasive computing, intrusion detection, computer games, etc.). In many application scenarios, it is important that goal recognition algorithms can recognize goals of an observed agent as fast as possible. However, many early approaches in the area of Plan Recognition As Planning, require quite large amounts of computation time to calculate a solution. Mainly to address this issue, recently, Pereira et al. developed an approach that is based on planning landmarks and is much more computationally efficient than previous approaches. However, the approach, as proposed by Pereira et al., also uses trivial landmarks (i.e., facts that are part of the initial state and goal description are landmarks by definition). In this paper, we show that it does not provide any benefit to use landmarks that are part of the initial state in a planning landmark based goal recognition approach. The empirical results show that omitting initial state landmarks for goal recognition improves goal recognition performance.
Leveraging Planning Landmarks for Hybrid Online Goal Recognition
Jan 25, 2023



Goal recognition is an important problem in many application domains (e.g., pervasive computing, intrusion detection, computer games, etc.). In many application scenarios it is important that goal recognition algorithms can recognize goals of an observed agent as fast as possible and with minimal domain knowledge. Hence, in this paper, we propose a hybrid method for online goal recognition that combines a symbolic planning landmark based approach and a data-driven goal recognition approach and evaluate it in a real-world cooking scenario. The empirical results show that the proposed method is not only significantly more efficient in terms of computation time than the state-of-the-art but also improves goal recognition performance. Furthermore, we show that the utilized planning landmark based approach, which was so far only evaluated on artificial benchmark domains, achieves also good recognition performance when applied to a real-world cooking scenario.
Investigating the Combination of Planning-Based and Data-Driven Methods for Goal Recognition
Jan 13, 2023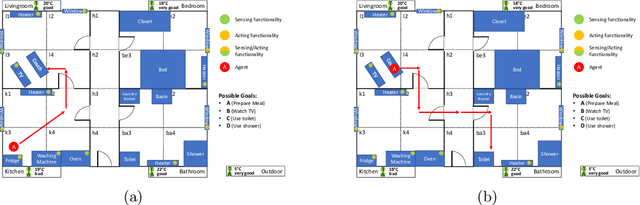
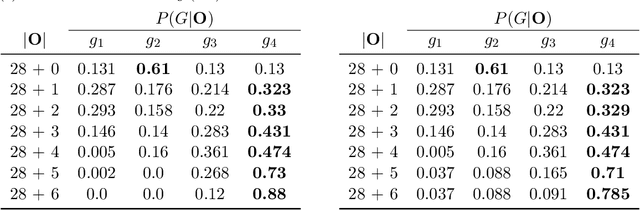
An important feature of pervasive, intelligent assistance systems is the ability to dynamically adapt to the current needs of their users. Hence, it is critical for such systems to be able to recognize those goals and needs based on observations of the user's actions and state of the environment. In this work, we investigate the application of two state-of-the-art, planning-based plan recognition approaches in a real-world setting. So far, these approaches were only evaluated in artificial settings in combination with agents that act perfectly rational. We show that such approaches have difficulties when used to recognize the goals of human subjects, because human behaviour is typically not perfectly rational. To overcome this issue, we propose an extension to the existing approaches through a classification-based method trained on observed behaviour data. We empirically show that the proposed extension not only outperforms the purely planning-based- and purely data-driven goal recognition methods but is also able to recognize the correct goal more reliably, especially when only a small number of observations were seen. This substantially improves the usefulness of hybrid goal recognition approaches for intelligent assistance systems, as recognizing a goal early opens much more possibilities for supportive reactions of the system.