 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeInvestigating the Combination of Planning-Based and Data-Driven Methods for Goal Recognition
Paper and Code
Jan 13, 2023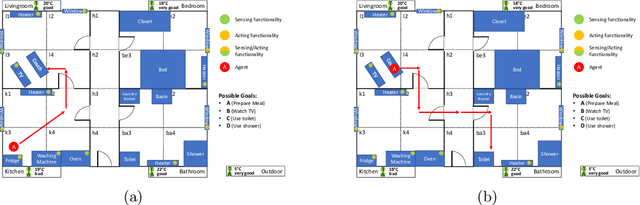
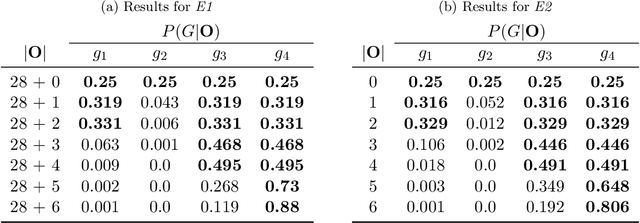
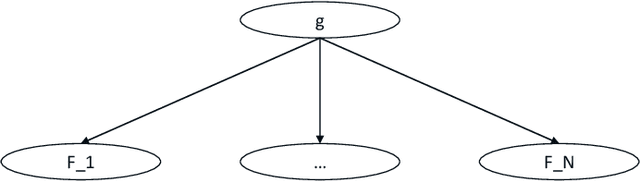
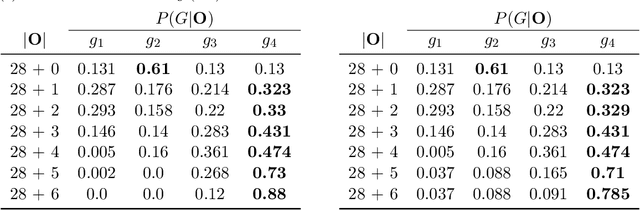
An important feature of pervasive, intelligent assistance systems is the ability to dynamically adapt to the current needs of their users. Hence, it is critical for such systems to be able to recognize those goals and needs based on observations of the user's actions and state of the environment. In this work, we investigate the application of two state-of-the-art, planning-based plan recognition approaches in a real-world setting. So far, these approaches were only evaluated in artificial settings in combination with agents that act perfectly rational. We show that such approaches have difficulties when used to recognize the goals of human subjects, because human behaviour is typically not perfectly rational. To overcome this issue, we propose an extension to the existing approaches through a classification-based method trained on observed behaviour data. We empirically show that the proposed extension not only outperforms the purely planning-based- and purely data-driven goal recognition methods but is also able to recognize the correct goal more reliably, especially when only a small number of observations were seen. This substantially improves the usefulness of hybrid goal recognition approaches for intelligent assistance systems, as recognizing a goal early opens much more possibilities for supportive reactions of the system.