 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDesigning for Difference: How Human Characteristics Shape Perceptions of Collaborative Robots
Jul 22, 2025The development of assistive robots for social collaboration raises critical questions about responsible and inclusive design, especially when interacting with individuals from protected groups such as those with disabilities or advanced age. Currently, research is scarce on how participants assess varying robot behaviors in combination with diverse human needs, likely since participants have limited real-world experience with advanced domestic robots. In the current study, we aim to address this gap while using methods that enable participants to assess robot behavior, as well as methods that support meaningful reflection despite limited experience. In an online study, 112 participants (from both experimental and control groups) evaluated 7 videos from a total of 28 variations of human-robot collaboration types. The experimental group first completed a cognitive-affective mapping (CAM) exercise on human-robot collaboration before providing their ratings. Although CAM reflection did not significantly affect overall ratings, it led to more pronounced assessments for certain combinations of robot behavior and human condition. Most importantly, the type of human-robot collaboration influences the assessment. Antisocial robot behavior was consistently rated as the lowest, while collaboration with aged individuals elicited more sensitive evaluations. Scenarios involving object handovers were viewed more positively than those without them. These findings suggest that both human characteristics and interaction paradigms influence the perceived acceptability of collaborative robots, underscoring the importance of prosocial design. They also highlight the potential of reflective methods, such as CAM, to elicit nuanced feedback, supporting the development of user-centered and socially responsible robotic systems tailored to diverse populations.
Fairness and Bias in Robot Learning
Jul 07, 2022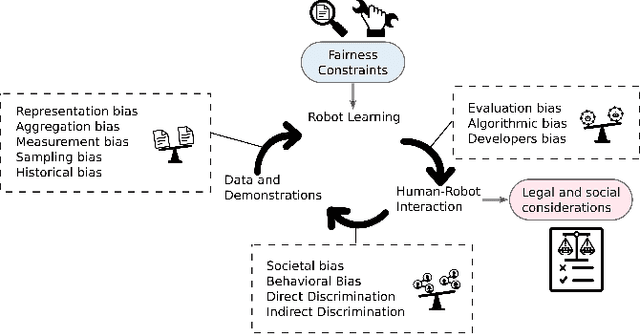
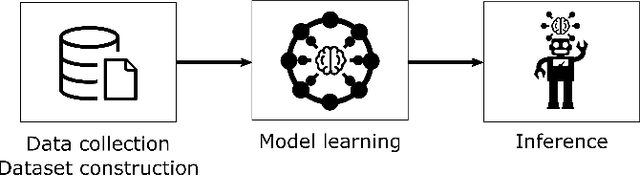
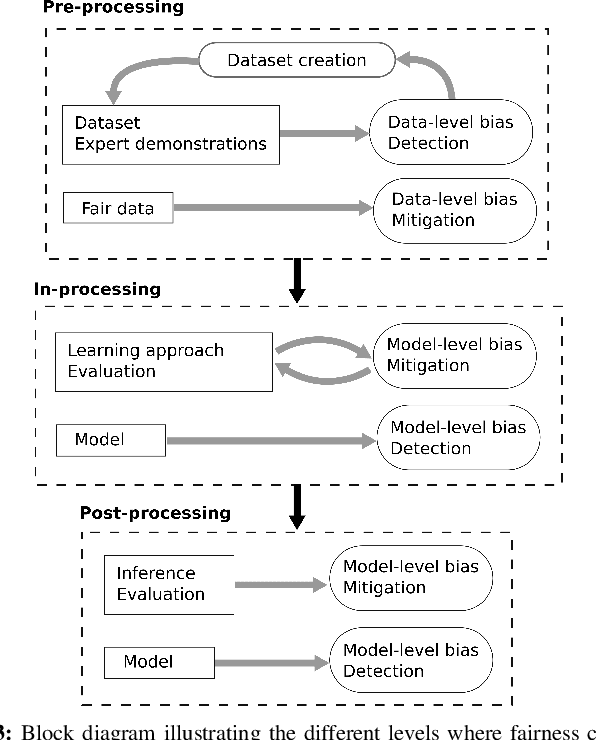
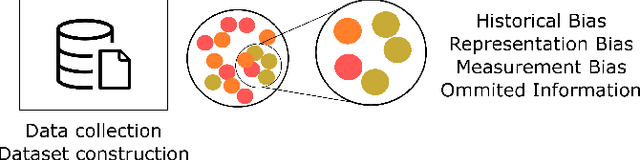
Machine learning has significantly enhanced the abilities of robots, enabling them to perform a wide range of tasks in human environments and adapt to our uncertain real world. Recent works in various domains of machine learning have highlighted the importance of accounting for fairness to ensure that these algorithms do not reproduce human biases and consequently lead to discriminatory outcomes. With robot learning systems increasingly performing more and more tasks in our everyday lives, it is crucial to understand the influence of such biases to prevent unintended behavior toward certain groups of people. In this work, we present the first survey on fairness in robot learning from an interdisciplinary perspective spanning technical, ethical, and legal challenges. We propose a taxonomy for sources of bias and the resulting types of discrimination due to them. Using examples from different robot learning domains, we examine scenarios of unfair outcomes and strategies to mitigate them. We present early advances in the field by covering different fairness definitions, ethical and legal considerations, and methods for fair robot learning. With this work, we aim at paving the road for groundbreaking developments in fair robot learning.
Doing Right by Not Doing Wrong in Human-Robot Collaboration
Feb 05, 2022As robotic systems become more and more capable of assisting humans in their everyday lives, we must consider the opportunities for these artificial agents to make their human collaborators feel unsafe or to treat them unfairly. Robots can exhibit antisocial behavior causing physical harm to people or reproduce unfair behavior replicating and even amplifying historical and societal biases which are detrimental to humans they interact with. In this paper, we discuss these issues considering sociable robotic manipulation and fair robotic decision making. We propose a novel approach to learning fair and sociable behavior, not by reproducing positive behavior, but rather by avoiding negative behavior. In this study, we highlight the importance of incorporating sociability in robot manipulation, as well as the need to consider fairness in human-robot interactions.
From Learning to Relearning: A Framework for Diminishing Bias in Social Robot Navigation
Jan 07, 2021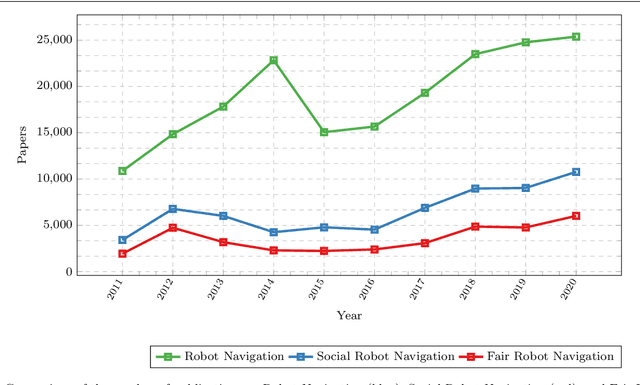
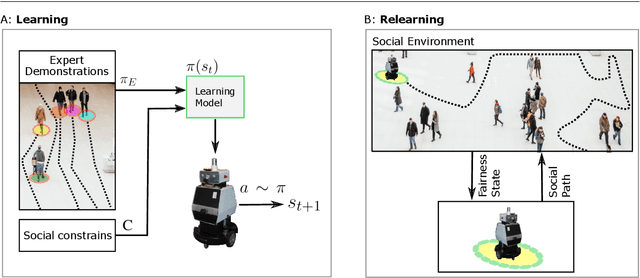
The exponentially increasing advances in robotics and machine learning are facilitating the transition of robots from being confined to controlled industrial spaces to performing novel everyday tasks in domestic and urban environments. In order to make the presence of robots safe as well as comfortable for humans, and to facilitate their acceptance in public environments, they are often equipped with social abilities for navigation and interaction. Socially compliant robot navigation is increasingly being learned from human observations or demonstrations. We argue that these techniques that typically aim to mimic human behavior do not guarantee fair behavior. As a consequence, social navigation models can replicate, promote, and amplify societal unfairness such as discrimination and segregation. In this work, we investigate a framework for diminishing bias in social robot navigation models so that robots are equipped with the capability to plan as well as adapt their paths based on both physical and social demands. Our proposed framework consists of two components: learning which incorporates social context into the learning process to account for safety and comfort, and relearning to detect and correct potentially harmful outcomes before the onset. We provide both technological and sociological analysis using three diverse case studies in different social scenarios of interaction. Moreover, we present ethical implications of deploying robots in social environments and propose potential solutions. Through this study, we highlight the importance and advocate for fairness in human-robot interactions in order to promote more equitable social relationships, roles, and dynamics and consequently positively influence our society.