 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSPARR: Simulation-based Policies with Asymmetric Real-world Residuals for Assembly
Feb 26, 2026Robotic assembly presents a long-standing challenge due to its requirement for precise, contact-rich manipulation. While simulation-based learning has enabled the development of robust assembly policies, their performance often degrades when deployed in real-world settings due to the sim-to-real gap. Conversely, real-world reinforcement learning (RL) methods avoid the sim-to-real gap, but rely heavily on human supervision and lack generalization ability to environmental changes. In this work, we propose a hybrid approach that combines a simulation-trained base policy with a real-world residual policy to efficiently adapt to real-world variations. The base policy, trained in simulation using low-level state observations and dense rewards, provides strong priors for initial behavior. The residual policy, learned in the real world using visual observations and sparse rewards, compensates for discrepancies in dynamics and sensor noise. Extensive real-world experiments demonstrate that our method, SPARR, achieves near-perfect success rates across diverse two-part assembly tasks. Compared to the state-of-the-art zero-shot sim-to-real methods, SPARR improves success rates by 38.4% while reducing cycle time by 29.7%. Moreover, SPARR requires no human expertise, in contrast to the state-of-the-art real-world RL approaches that depend heavily on human supervision.
Point Bridge: 3D Representations for Cross Domain Policy Learning
Jan 24, 2026Robot foundation models are beginning to deliver on the promise of generalist robotic agents, yet progress remains constrained by the scarcity of large-scale real-world manipulation datasets. Simulation and synthetic data generation offer a scalable alternative, but their usefulness is limited by the visual domain gap between simulation and reality. In this work, we present Point Bridge, a framework that leverages unified, domain-agnostic point-based representations to unlock synthetic datasets for zero-shot sim-to-real policy transfer, without explicit visual or object-level alignment. Point Bridge combines automated point-based representation extraction via Vision-Language Models (VLMs), transformer-based policy learning, and efficient inference-time pipelines to train capable real-world manipulation agents using only synthetic data. With additional co-training on small sets of real demonstrations, Point Bridge further improves performance, substantially outperforming prior vision-based sim-and-real co-training methods. It achieves up to 44% gains in zero-shot sim-to-real transfer and up to 66% with limited real data across both single-task and multitask settings. Videos of the robot are best viewed at: https://pointbridge3d.github.io/
Towards Task-Specific Modular Gripper Fingers: Automatic Production of Fingertip Mechanics
Oct 18, 2022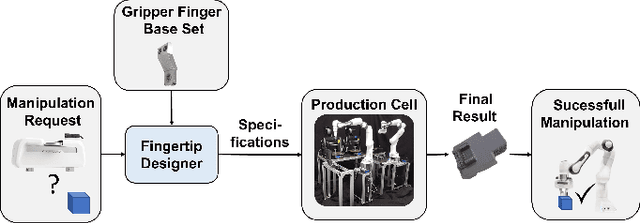
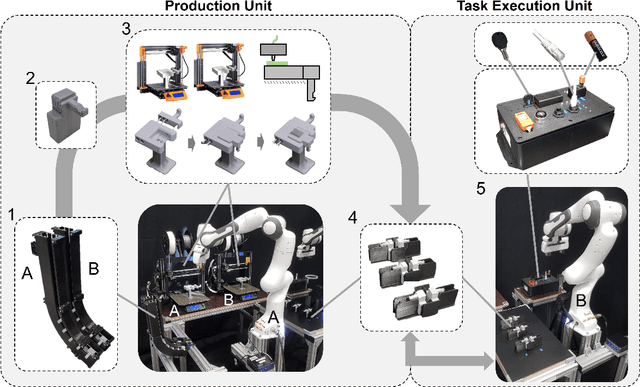
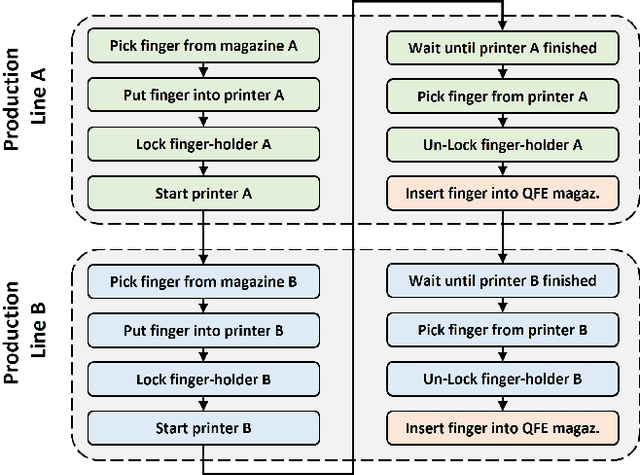
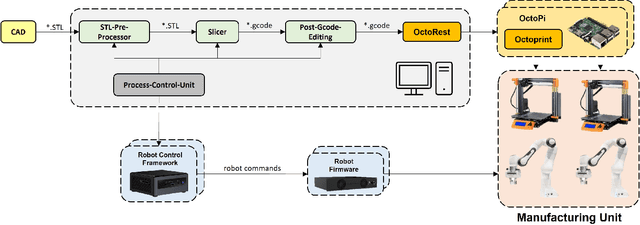
The number of sequential tasks a single gripper can perform is significantly limited by its design. In many cases, changing the gripper fingers is required to successfully conduct multiple consecutive tasks. For this reason, several robotic tool change systems have been introduced that allow an automatic changing of the entire end-effector. However, many situations require only the modification or the change of the fingertip, making the exchange of the entire gripper uneconomic. In this paper, we introduce a paradigm for automatic task-specific fingertip production. The setup used in the proposed framework consists of a production and task execution unit, containing a robotic manipulator, and two 3D printers - autonomously producing the gripper fingers. It also consists of a second manipulator that uses a quick-exchange mechanism to pick up the printed fingertips and evaluates gripping performance. The setup is experimentally validated by conducting automatic production of three different fingertips and executing graspstability tests as well as multiple pick- and insertion tasks, with and without position offsets - using these fingertips. The proposed paradigm, indeed, goes beyond fingertip production and serves as a foundation for a fully automatic fingertip design, production and application pipeline - potentially improving manufacturing flexibility and representing a new production paradigm: tactile 3D manufacturing.
A Framework for Robot Manipulation: Skill Formalism, Meta Learning and Adaptive Control
May 22, 2018



In this paper we introduce a novel framework for expressing and learning force-sensitive robot manipulation skills. It is based on a formalism that extends our previous work on adaptive impedance control with meta parameter learning and compatible skill specifications. This way the system is also able to make use of abstract expert knowledge by incorporating process descriptions and quality evaluation metrics. We evaluate various state-of-the-art schemes for the meta parameter learning and experimentally compare selected ones. Our results clearly indicate that the combination of our adaptive impedance controller with a carefully defined skill formalism significantly reduces the complexity of manipulation tasks even for learning peg-in-hole with submillimeter industrial tolerances. Overall, the considered system is able to learn variations of this skill in under 20 minutes. In fact, experimentally the system was able to perform the learned tasks faster than humans, leading to the first learning-based solution of complex assembly at such real-world performance.