 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSafety and optimality in learning-based control at low computational cost
May 12, 2025Applying machine learning methods to physical systems that are supposed to act in the real world requires providing safety guarantees. However, methods that include such guarantees often come at a high computational cost, making them inapplicable to large datasets and embedded devices with low computational power. In this paper, we propose CoLSafe, a computationally lightweight safe learning algorithm whose computational complexity grows sublinearly with the number of data points. We derive both safety and optimality guarantees and showcase the effectiveness of our algorithm on a seven-degrees-of-freedom robot arm.
Kernel-based learning with guarantees for multi-agent applications
Apr 15, 2024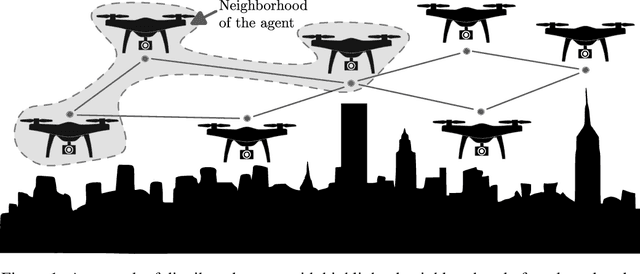
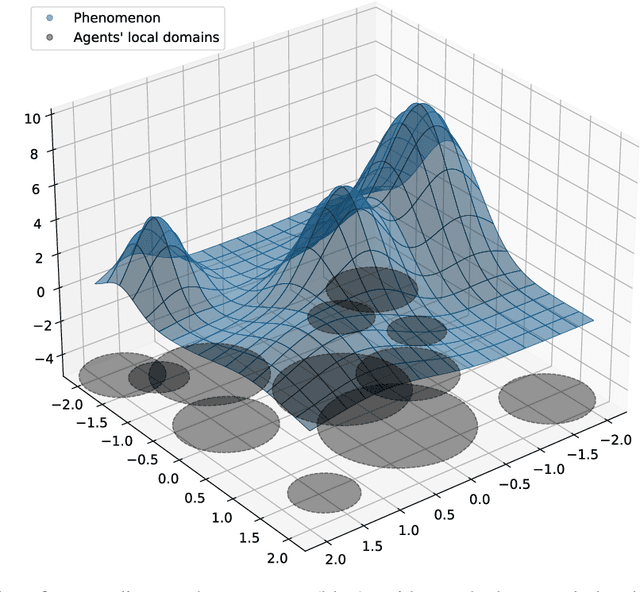
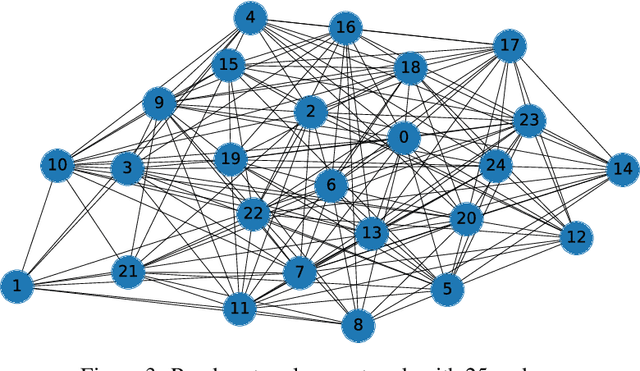
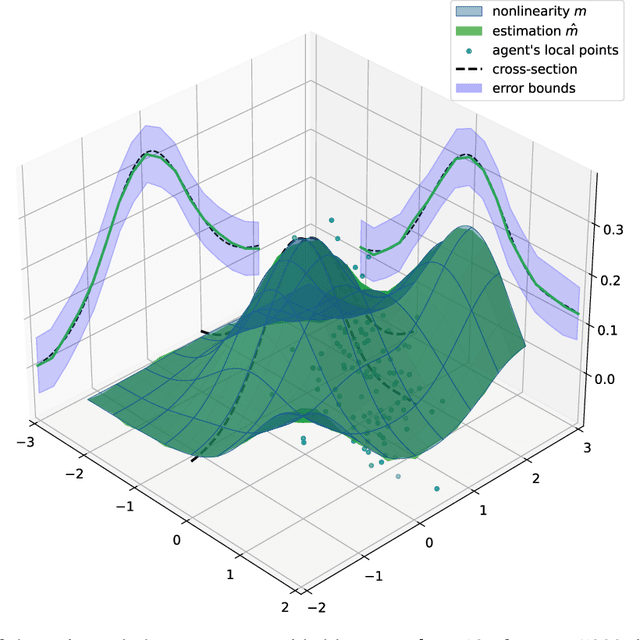
This paper addresses a kernel-based learning problem for a network of agents locally observing a latent multidimensional, nonlinear phenomenon in a noisy environment. We propose a learning algorithm that requires only mild a priori knowledge about the phenomenon under investigation and delivers a model with corresponding non-asymptotic high probability error bounds. Both non-asymptotic analysis of the method and numerical simulation results are presented and discussed in the paper.
A computationally lightweight safe learning algorithm
Sep 07, 2023Safety is an essential asset when learning control policies for physical systems, as violating safety constraints during training can lead to expensive hardware damage. In response to this need, the field of safe learning has emerged with algorithms that can provide probabilistic safety guarantees without knowledge of the underlying system dynamics. Those algorithms often rely on Gaussian process inference. Unfortunately, Gaussian process inference scales cubically with the number of data points, limiting applicability to high-dimensional and embedded systems. In this paper, we propose a safe learning algorithm that provides probabilistic safety guarantees but leverages the Nadaraya-Watson estimator instead of Gaussian processes. For the Nadaraya-Watson estimator, we can reach logarithmic scaling with the number of data points. We provide theoretical guarantees for the estimates, embed them into a safe learning algorithm, and show numerical experiments on a simulated seven-degrees-of-freedom robot manipulator.
Decentralized diffusion-based learning under non-parametric limited prior knowledge
May 05, 2023We study the problem of diffusion-based network learning of a nonlinear phenomenon, $m$, from local agents' measurements collected in a noisy environment. For a decentralized network and information spreading merely between directly neighboring nodes, we propose a non-parametric learning algorithm, that avoids raw data exchange and requires only mild \textit{a priori} knowledge about $m$. Non-asymptotic estimation error bounds are derived for the proposed method. Its potential applications are illustrated through simulation experiments.