 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA deep latent variable model for semi-supervised multi-unit soft sensing in industrial processes
Jul 18, 2024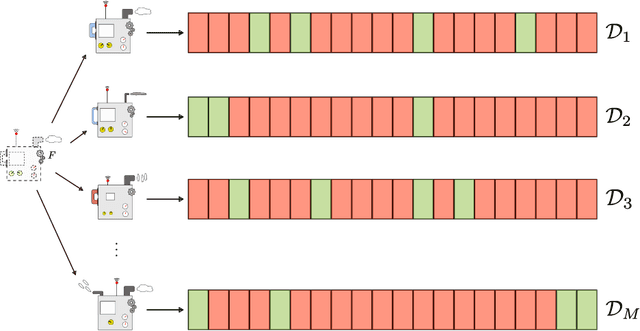
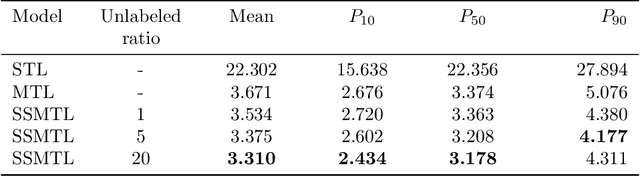
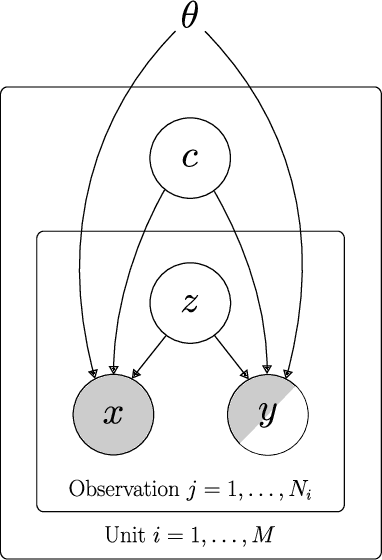
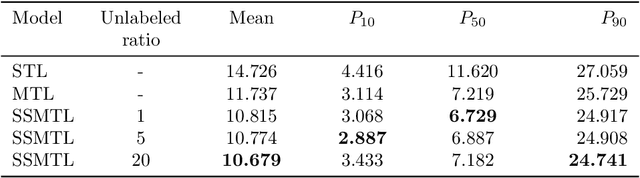
In many industrial processes, an apparent lack of data limits the development of data-driven soft sensors. There are, however, often opportunities to learn stronger models by being more data-efficient. To achieve this, one can leverage knowledge about the data from which the soft sensor is learned. Taking advantage of properties frequently possessed by industrial data, we introduce a deep latent variable model for semi-supervised multi-unit soft sensing. This hierarchical, generative model is able to jointly model different units, as well as learning from both labeled and unlabeled data. An empirical study of multi-unit soft sensing is conducted using two datasets: a synthetic dataset of single-phase fluid flow, and a large, real dataset of multi-phase flow in oil and gas wells. We show that by combining semi-supervised and multi-task learning, the proposed model achieves superior results, outperforming current leading methods for this soft sensing problem. We also show that when a model has been trained on a multi-unit dataset, it may be finetuned to previously unseen units using only a handful of data points. In this finetuning procedure, unlabeled data improve soft sensor performance; remarkably, this is true even when no labeled data are available.
Multi-unit soft sensing permits few-shot learning
Sep 27, 2023



Recent literature has explored various ways to improve soft sensors using learning algorithms with transferability. Broadly put, the performance of a soft sensor may be strengthened when it is learned by solving multiple tasks. The usefulness of transferability depends on how strongly related the devised learning tasks are. A particularly relevant case for transferability, is when a soft sensor is to be developed for a process of which there are many realizations, e.g. system or device with many implementations from which data is available. Then, each realization presents a soft sensor learning task, and it is reasonable to expect that the different tasks are strongly related. Applying transferability in this setting leads to what we call multi-unit soft sensing, where a soft sensor models a process by learning from data from all of its realizations. This paper explores the learning abilities of a multi-unit soft sensor, which is formulated as a hierarchical model and implemented using a deep neural network. In particular, we investigate how well the soft sensor generalizes as the number of units increase. Using a large industrial dataset, we demonstrate that, when the soft sensor is learned from a sufficient number of tasks, it permits few-shot learning on data from new units. Surprisingly, regarding the difficulty of the task, few-shot learning on 1-3 data points often leads to a high performance on new units.
Adjustment formulas for learning causal steady-state models from closed-loop operational data
Nov 10, 2022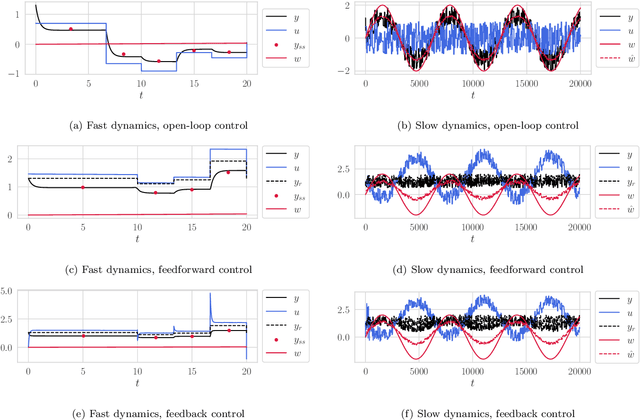
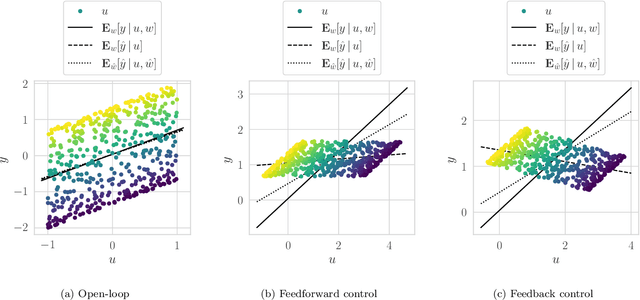
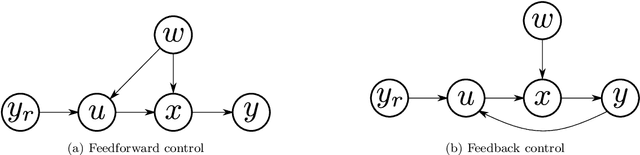
Steady-state models which have been learned from historical operational data may be unfit for model-based optimization unless correlations in the training data which are introduced by control are accounted for. Using recent results from work on structural dynamical causal models, we derive a formula for adjusting for this control confounding, enabling the estimation of a causal steady-state model from closed-loop steady-state data. The formula assumes that the available data have been gathered under some fixed control law. It works by estimating and taking into account the disturbance which the controller is trying to counteract, and enables learning from data gathered under both feedforward and feedback control.