Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdjustment formulas for learning causal steady-state models from closed-loop operational data
Paper and Code
Nov 10, 2022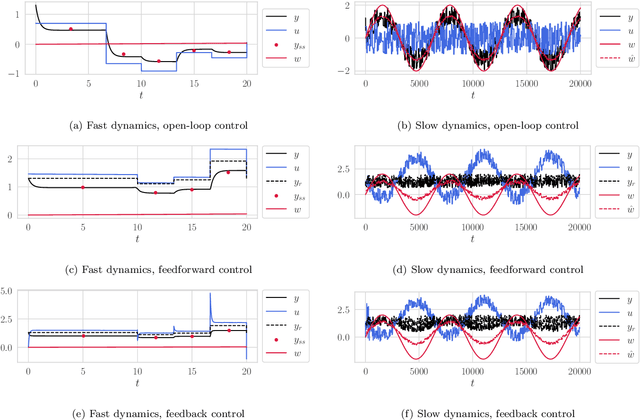
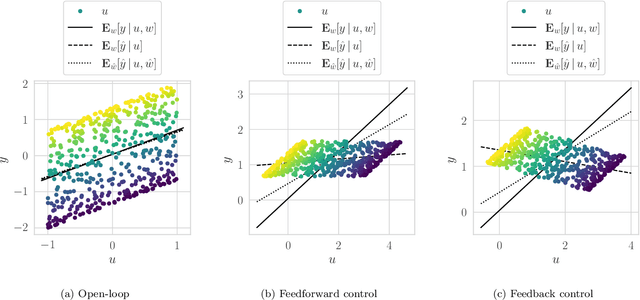
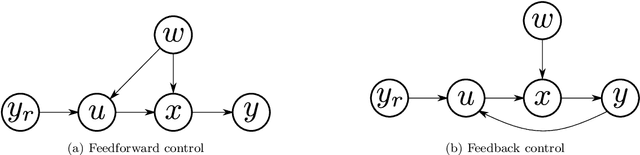
Steady-state models which have been learned from historical operational data may be unfit for model-based optimization unless correlations in the training data which are introduced by control are accounted for. Using recent results from work on structural dynamical causal models, we derive a formula for adjusting for this control confounding, enabling the estimation of a causal steady-state model from closed-loop steady-state data. The formula assumes that the available data have been gathered under some fixed control law. It works by estimating and taking into account the disturbance which the controller is trying to counteract, and enables learning from data gathered under both feedforward and feedback control.
* 8 pages, 3 figures. This work has been submitted to IFAC for possible
publication
View paper on