 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Deformable Object Manipulation Using Task-Level Iterative Learning Control
Feb 24, 2026Dynamic manipulation of deformable objects is challenging for humans and robots because they have infinite degrees of freedom and exhibit underactuated dynamics. We introduce a Task-Level Iterative Learning Control method for dynamic manipulation of deformable objects. We demonstrate this method on a non-planar rope manipulation task called the flying knot. Using a single human demonstration and a simplified rope model, the method learns directly on hardware without reliance on large amounts of demonstration data or massive amounts of simulation. At each iteration, the algorithm constructs a local inverse model of the robot and rope by solving a quadratic program to propagate task-space errors into action updates. We evaluate performance across 7 different kinds of ropes, including chain, latex surgical tubing, and braided and twisted ropes, ranging in thicknesses of 7--25mm and densities of 0.013--0.5 kg/m. Learning achieves a 100\% success rate within 10 trials on all ropes. Furthermore, the method can successfully transfer between most rope types in approximately 2--5 trials. https://flying-knots.github.io
The Invisible Map: Visual-Inertial SLAM with Fiducial Markers for Smartphone-based Indoor Navigation
Oct 16, 2023We present a system for creating building-scale, easily navigable 3D maps using mainstream smartphones. In our approach, we formulate the 3D-mapping problem as an instance of Graph SLAM and infer the position of both building landmarks (fiducial markers) and navigable paths through the environment (phone poses). Our results demonstrate the system's ability to create accurate 3D maps. Further, we highlight the importance of careful selection of mapping hyperparameters and provide a novel technique for tuning these hyperparameters to adapt our algorithm to new environments.
Greedy Perspectives: Multi-Drone View Planning for Collaborative Coverage in Cluttered Environments
Oct 16, 2023

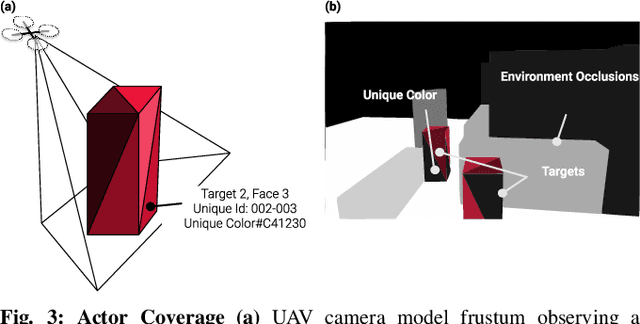

Deployment of teams of aerial robots could enable large-scale filming of dynamic groups of people (actors) in complex environments for novel applications in areas such as team sports and cinematography. Toward this end, methods for submodular maximization via sequential greedy planning can be used for scalable optimization of camera views across teams of robots but face challenges with efficient coordination in cluttered environments. Obstacles can produce occlusions and increase chances of inter-robot collision which can violate requirements for near-optimality guarantees. To coordinate teams of aerial robots in filming groups of people in dense environments, a more general view-planning approach is required. We explore how collision and occlusion impact performance in filming applications through the development of a multi-robot multi-actor view planner with an occlusion-aware objective for filming groups of people and compare with a greedy formation planner. To evaluate performance, we plan in five test environments with complex multiple-actor behaviors. Compared with a formation planner, our sequential planner generates 14% greater view reward over the actors for three scenarios and comparable performance to formation planning on two others. We also observe near identical performance of sequential planning both with and without inter-robot collision constraints. Overall, we demonstrate effective coordination of teams of aerial robots for filming groups that may split, merge, or spread apart and in environments cluttered with obstacles that may cause collisions or occlusions.