 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDynamic Neural Potential Field: Online Trajectory Optimization in Presence of Moving Obstacles
Oct 09, 2024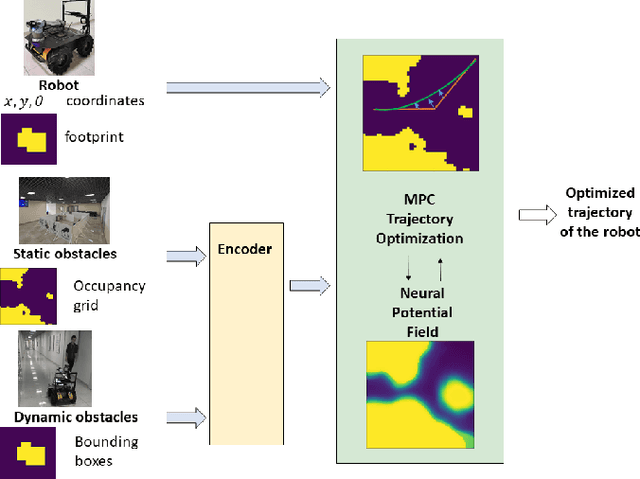
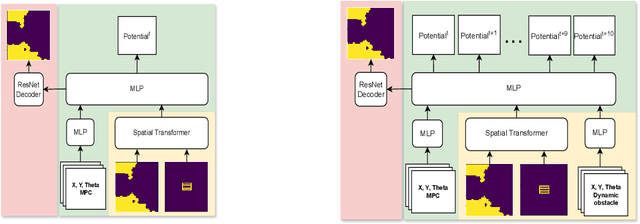
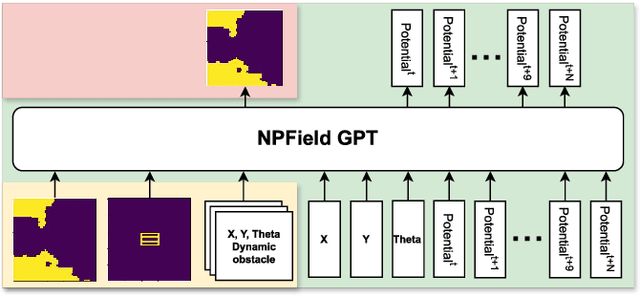
We address a task of local trajectory planning for the mobile robot in the presence of static and dynamic obstacles. Local trajectory is obtained as a numerical solution of the Model Predictive Control (MPC) problem. Collision avoidance may be provided by adding repulsive potential of the obstacles to the cost function of MPC. We develop an approach, where repulsive potential is estimated by the neural model. We propose and explore three possible strategies of handling dynamic obstacles. First, environment with dynamic obstacles is considered as a sequence of static environments. Second, the neural model predict a sequence of repulsive potential at once. Third, the neural model predict future repulsive potential step by step in autoregressive mode. We implement these strategies and compare it with CIAO* and MPPI using BenchMR framework. First two strategies showed higher performance than CIAO* and MPPI while preserving safety constraints. The third strategy was a bit slower, however it still satisfy time limits. We deploy our approach on Husky UGV mobile platform, which move through the office corridors under proposed MPC local trajectory planner. The code and trained models are available at \url{https://github.com/CognitiveAISystems/Dynamic-Neural-Potential-Field}.
Model-based Policy Optimization using Symbolic World Model
Jul 18, 2024



The application of learning-based control methods in robotics presents significant challenges. One is that model-free reinforcement learning algorithms use observation data with low sample efficiency. To address this challenge, a prevalent approach is model-based reinforcement learning, which involves employing an environment dynamics model. We suggest approximating transition dynamics with symbolic expressions, which are generated via symbolic regression. Approximation of a mechanical system with a symbolic model has fewer parameters than approximation with neural networks, which can potentially lead to higher accuracy and quality of extrapolation. We use a symbolic dynamics model to generate trajectories in model-based policy optimization to improve the sample efficiency of the learning algorithm. We evaluate our approach across various tasks within simulated environments. Our method demonstrates superior sample efficiency in these tasks compared to model-free and model-based baseline methods.
Neural Potential Field for Obstacle-Aware Local Motion Planning
Oct 25, 2023



Model predictive control (MPC) may provide local motion planning for mobile robotic platforms. The challenging aspect is the analytic representation of collision cost for the case when both the obstacle map and robot footprint are arbitrary. We propose a Neural Potential Field: a neural network model that returns a differentiable collision cost based on robot pose, obstacle map, and robot footprint. The differentiability of our model allows its usage within the MPC solver. It is computationally hard to solve problems with a very high number of parameters. Therefore, our architecture includes neural image encoders, which transform obstacle maps and robot footprints into embeddings, which reduce problem dimensionality by two orders of magnitude. The reference data for network training are generated based on algorithmic calculation of a signed distance function. Comparative experiments showed that the proposed approach is comparable with existing local planners: it provides trajectories with outperforming smoothness, comparable path length, and safe distance from obstacles. Experiment on Husky UGV mobile robot showed that our approach allows real-time and safe local planning. The code for our approach is presented at https://github.com/cog-isa/NPField together with demo video.