 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDynamic Neural Potential Field: Online Trajectory Optimization in Presence of Moving Obstacles
Oct 09, 2024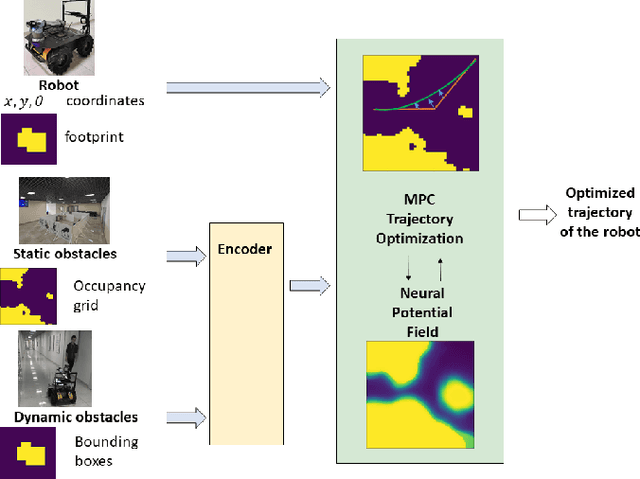
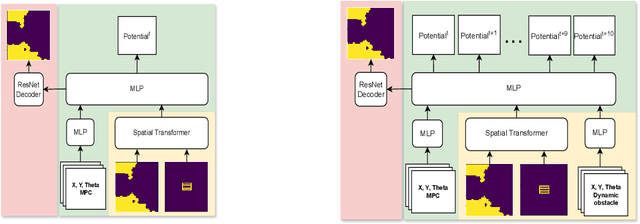
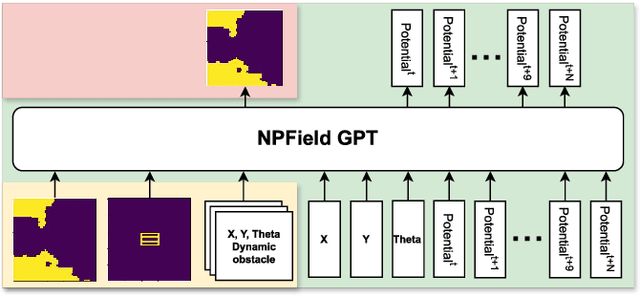
We address a task of local trajectory planning for the mobile robot in the presence of static and dynamic obstacles. Local trajectory is obtained as a numerical solution of the Model Predictive Control (MPC) problem. Collision avoidance may be provided by adding repulsive potential of the obstacles to the cost function of MPC. We develop an approach, where repulsive potential is estimated by the neural model. We propose and explore three possible strategies of handling dynamic obstacles. First, environment with dynamic obstacles is considered as a sequence of static environments. Second, the neural model predict a sequence of repulsive potential at once. Third, the neural model predict future repulsive potential step by step in autoregressive mode. We implement these strategies and compare it with CIAO* and MPPI using BenchMR framework. First two strategies showed higher performance than CIAO* and MPPI while preserving safety constraints. The third strategy was a bit slower, however it still satisfy time limits. We deploy our approach on Husky UGV mobile platform, which move through the office corridors under proposed MPC local trajectory planner. The code and trained models are available at \url{https://github.com/CognitiveAISystems/Dynamic-Neural-Potential-Field}.
Chaurah: A Smart Raspberry Pi based Parking System
Dec 28, 2023The widespread usage of cars and other large, heavy vehicles necessitates the development of an effective parking infrastructure. Additionally, algorithms for detection and recognition of number plates are often used to identify automobiles all around the world where standardized plate sizes and fonts are enforced, making recognition an effortless task. As a result, both kinds of data can be combined to develop an intelligent parking system focuses on the technology of Automatic Number Plate Recognition (ANPR). Retrieving characters from an inputted number plate image is the sole purpose of ANPR which is a costly procedure. In this article, we propose Chaurah, a minimal cost ANPR system that relies on a Raspberry Pi 3 that was specifically created for parking facilities. The system employs a dual-stage methodology, with the first stage being an ANPR system which makes use of two convolutional neural networks (CNNs). The primary locates and recognises license plates from a vehicle image, while the secondary performs Optical Character Recognition (OCR) to identify individualized numbers from the number plate. An application built with Flutter and Firebase for database administration and license plate record comparison makes up the second component of the overall solution. The application also acts as an user-interface for the billing mechanism based on parking time duration resulting in an all-encompassing software deployment of the study.
From Robots to Books: An Introduction to Smart Applications of AI in Education
Jan 11, 2023The world around us has undergone a radical transformation due to rapid technological advancement in recent decades. The industry of the future generation is evolving, and artificial intelligence is the following change in the making popularly known as Industry 4.0. Indeed, experts predict that artificial intelligence(AI) will be the main force behind the following significant virtual shift in the way we stay, converse, study, live, communicate and conduct business. All facets of our social connection are being transformed by this growing technology. One of the newest areas of educational technology is Artificial Intelligence in the field of Education(AIEd).This study emphasizes the different applications of artificial intelligence in education from both an industrial and academic standpoint. It highlights the most recent contextualized learning novel transformative evaluations and advancements in sophisticated tutoring systems. It analyses the AIEd's ethical component and the influence of the transition on people, particularly students and instructors as well. Finally, this article touches on AIEd's potential future research and practices. The goal of this study is to introduce the present-day applications to its intended audience.