 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDecentralized Fusion of 3D Extended Object Tracking based on a B-Spline Shape Model
Apr 25, 2025Extended Object Tracking (EOT) exploits the high resolution of modern sensors for detailed environmental perception. Combined with decentralized fusion, it contributes to a more scalable and robust perception system. This paper investigates the decentralized fusion of 3D EOT using a B-spline curve based model. The spline curve is used to represent the side-view profile, which is then extruded with a width to form a 3D shape. We use covariance intersection (CI) for the decentralized fusion and discuss the challenge of applying it to EOT. We further evaluate the tracking result of the decentralized fusion with simulated and real datasets of traffic scenarios. We show that the CI-based fusion can significantly improve the tracking performance for sensors with unfavorable perspective.
3D Extended Object Tracking based on Extruded B-Spline Side View Profiles
Mar 13, 2025Object tracking is an essential task for autonomous systems. With the advancement of 3D sensors, these systems can better perceive their surroundings using effective 3D Extended Object Tracking (EOT) methods. Based on the observation that common road users are symmetrical on the right and left sides in the traveling direction, we focus on the side view profile of the object. In order to leverage of the development in 2D EOT and balance the number of parameters of a shape model in the tracking algorithms, we propose a method for 3D extended object tracking (EOT) by describing the side view profile of the object with B-spline curves and forming an extrusion to obtain a 3D extent. The use of B-spline curves exploits their flexible representation power by allowing the control points to move freely. The algorithm is developed into an Extended Kalman Filter (EKF). For a through evaluation of this method, we use simulated traffic scenario of different vehicle models and realworld open dataset containing both radar and lidar data.
Applying Extended Object Tracking for Self-Localization of Roadside Radar Sensors
Jul 03, 2024
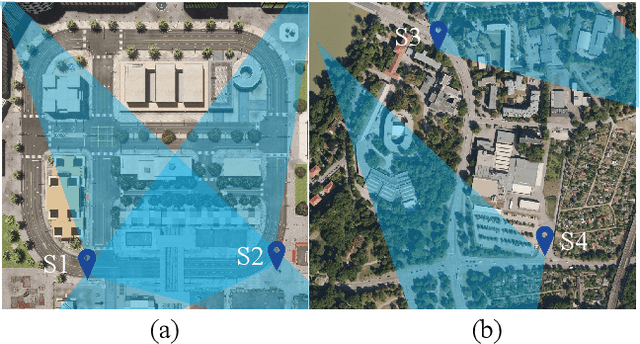
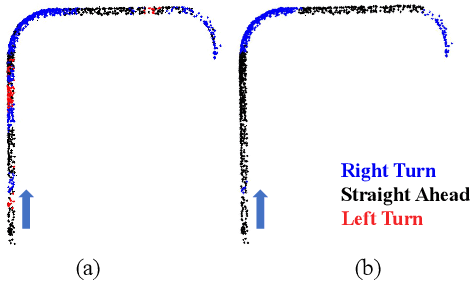

Intelligent Transportation Systems (ITS) can benefit from roadside 4D mmWave radar sensors for large-scale traffic monitoring due to their weatherproof functionality, long sensing range and low manufacturing cost. However, the localization method using external measurement devices has limitations in urban environments. Furthermore, if the sensor mount exhibits changes due to environmental influences, they cannot be corrected when the measurement is performed only during the installation. In this paper, we propose self-localization of roadside radar data using Extended Object Tracking (EOT). The method analyses both the tracked trajectories of the vehicles observed by the sensor and the aerial laser scan of city streets, assigns labels of driving behaviors such as "straight ahead", "left turn", "right turn" to trajectory sections and road segments, and performs Semantic Iterative Closest Points (SICP) algorithm to register the point cloud. The method exploits the result from a down stream task -- object tracking -- for localization. We demonstrate high accuracy in the sub-meter range along with very low orientation error. The method also shows good data efficiency. The evaluation is done in both simulation and real-world tests.
Scalable Radar-based ITS: Self-localization and Occupancy Heat Map for Traffic Analysis
Apr 01, 2024



4D mmWave radar sensors are well suited for city scale Intelligent Transportation Systems (ITS) given their long sensing range, weatherproof functionality, simple mechanical design, and low manufacturing cost. In this paper, we investigate radar-based ITS for scalable traffic analysis. Localization of these radar sensors in a city scale range is a fundamental task in ITS. For mobile ITS setups it requires more endeavor. To address this task, we propose a self-localization approach that matches two descriptions of "road": the one from the geometry of the motion trajectories of cumulatively observed vehicles, and the other one from the aerial laser scan. An ICP (iterative closest point) algorithm is used to register the motion trajectory into the road section of the laser scan to estimate the sensor pose. We evaluates the results and show that it outperforms other map-based radar localization methods, especially for the orientation estimation. Beyond the localization result, we project radar sensor data onto city scale laser scan and generate an scalable occupancy heat map as a traffic analysis tool. This is demonstrated using two radar sensors monitoring an urban area in the real world.