 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeApplying Extended Object Tracking for Self-Localization of Roadside Radar Sensors
Paper and Code
Jul 03, 2024
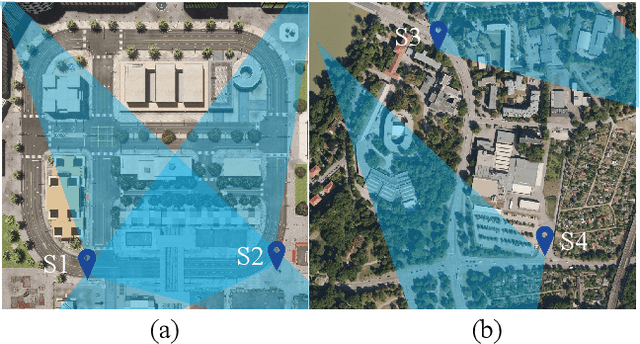
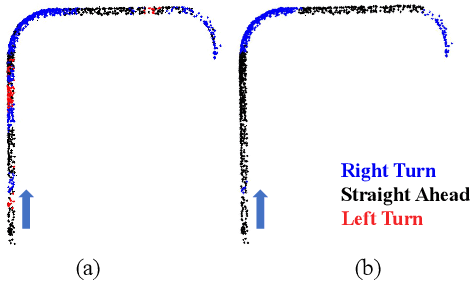

Intelligent Transportation Systems (ITS) can benefit from roadside 4D mmWave radar sensors for large-scale traffic monitoring due to their weatherproof functionality, long sensing range and low manufacturing cost. However, the localization method using external measurement devices has limitations in urban environments. Furthermore, if the sensor mount exhibits changes due to environmental influences, they cannot be corrected when the measurement is performed only during the installation. In this paper, we propose self-localization of roadside radar data using Extended Object Tracking (EOT). The method analyses both the tracked trajectories of the vehicles observed by the sensor and the aerial laser scan of city streets, assigns labels of driving behaviors such as "straight ahead", "left turn", "right turn" to trajectory sections and road segments, and performs Semantic Iterative Closest Points (SICP) algorithm to register the point cloud. The method exploits the result from a down stream task -- object tracking -- for localization. We demonstrate high accuracy in the sub-meter range along with very low orientation error. The method also shows good data efficiency. The evaluation is done in both simulation and real-world tests.