 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFeature-Space Generative Models for One-Shot Class-Incremental Learning
Jan 25, 2026Few-shot class-incremental learning (FSCIL) is a paradigm where a model, initially trained on a dataset of base classes, must adapt to an expanding problem space by recognizing novel classes with limited data. We focus on the challenging FSCIL setup where a model receives only a single sample (1-shot) for each novel class and no further training or model alterations are allowed after the base training phase. This makes generalization to novel classes particularly difficult. We propose a novel approach predicated on the hypothesis that base and novel class embeddings have structural similarity. We map the original embedding space into a residual space by subtracting the class prototype (i.e., the average class embedding) of input samples. Then, we leverage generative modeling with VAE or diffusion models to learn the multi-modal distribution of residuals over the base classes, and we use this as a valuable structural prior to improve recognition of novel classes. Our approach, Gen1S, consistently improves novel class recognition over the state of the art across multiple benchmarks and backbone architectures.
Controllable Forgetting Mechanism for Few-Shot Class-Incremental Learning
Jan 27, 2025Class-incremental learning in the context of limited personal labeled samples (few-shot) is critical for numerous real-world applications, such as smart home devices. A key challenge in these scenarios is balancing the trade-off between adapting to new, personalized classes and maintaining the performance of the model on the original, base classes. Fine-tuning the model on novel classes often leads to the phenomenon of catastrophic forgetting, where the accuracy of base classes declines unpredictably and significantly. In this paper, we propose a simple yet effective mechanism to address this challenge by controlling the trade-off between novel and base class accuracy. We specifically target the ultra-low-shot scenario, where only a single example is available per novel class. Our approach introduces a Novel Class Detection (NCD) rule, which adjusts the degree of forgetting a priori while simultaneously enhancing performance on novel classes. We demonstrate the versatility of our solution by applying it to state-of-the-art Few-Shot Class-Incremental Learning (FSCIL) methods, showing consistent improvements across different settings. To better quantify the trade-off between novel and base class performance, we introduce new metrics: NCR@2FOR and NCR@5FOR. Our approach achieves up to a 30% improvement in novel class accuracy on the CIFAR100 dataset (1-shot, 1 novel class) while maintaining a controlled base class forgetting rate of 2%.
Swiss DINO: Efficient and Versatile Vision Framework for On-device Personal Object Search
Jul 10, 2024
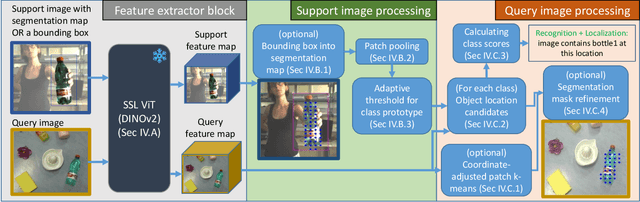


In this paper, we address a recent trend in robotic home appliances to include vision systems on personal devices, capable of personalizing the appliances on the fly. In particular, we formulate and address an important technical task of personal object search, which involves localization and identification of personal items of interest on images captured by robotic appliances, with each item referenced only by a few annotated images. The task is crucial for robotic home appliances and mobile systems, which need to process personal visual scenes or to operate with particular personal objects (e.g., for grasping or navigation). In practice, personal object search presents two main technical challenges. First, a robot vision system needs to be able to distinguish between many fine-grained classes, in the presence of occlusions and clutter. Second, the strict resource requirements for the on-device system restrict the usage of most state-of-the-art methods for few-shot learning and often prevent on-device adaptation. In this work, we propose Swiss DINO: a simple yet effective framework for one-shot personal object search based on the recent DINOv2 transformer model, which was shown to have strong zero-shot generalization properties. Swiss DINO handles challenging on-device personalized scene understanding requirements and does not require any adaptation training. We show significant improvement (up to 55%) in segmentation and recognition accuracy compared to the common lightweight solutions, and significant footprint reduction of backbone inference time (up to 100x) and GPU consumption (up to 10x) compared to the heavy transformer-based solutions.
Estimating Graphlet Statistics via Lifting
Feb 23, 2018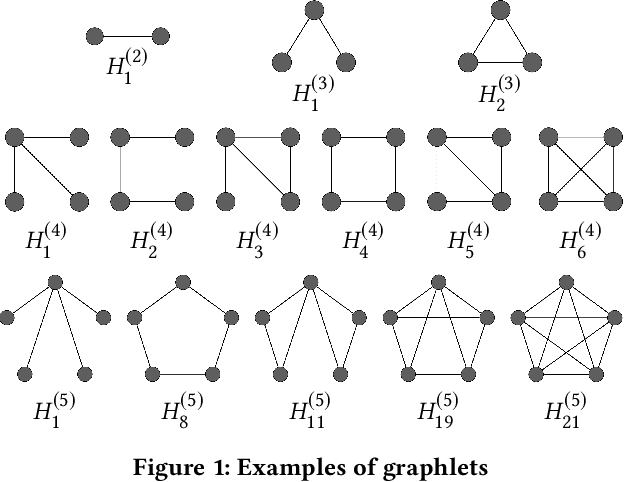

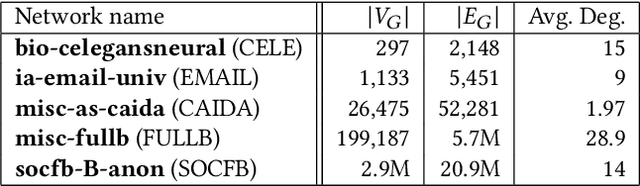

Exploratory analysis over network data is often limited by our ability to efficiently calculate graph statistics, which can provide a model-free understanding of macroscopic properties of a network. This work introduces a framework for estimating the graphlet count - the number of occurrences of a small subgraph motif (e.g. a wedge or a triangle) in the network. For massive graphs, where accessing the whole graph is not possible, the only viable algorithms are those which act locally by making a limited number of vertex neighborhood queries. We introduce a Monte Carlo sampling technique for graphlet counts, called lifting, which can simultaneously sample all graphlets of size up to $k$ vertices. We outline three variants of lifted graphlet counts: the ordered, unordered, and shotgun estimators. We prove that our graphlet count updates are unbiased for the true graphlet count, have low correlation between samples, and have a controlled variance. We compare the experimental performance of lifted graphlet counts to the state-of-the art graphlet sampling procedures: Waddling and the pairwise subgraph random walk.