 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCo-evolutionary hybrid intelligence
Dec 09, 2021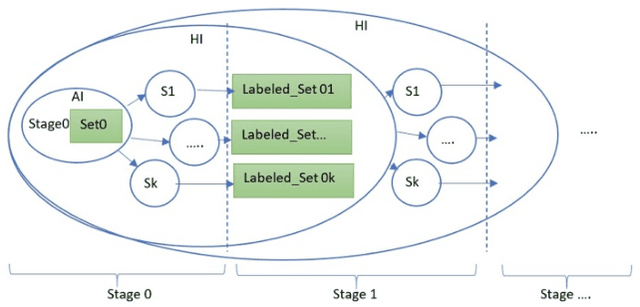
Artificial intelligence is one of the drivers of modern technological development. The current approach to the development of intelligent systems is data-centric. It has several limitations: it is fundamentally impossible to collect data for modeling complex objects and processes; training neural networks requires huge computational and energy resources; solutions are not explainable. The article discusses an alternative approach to the development of artificial intelligence systems based on human-machine hybridization and their co-evolution.
Correlation Filter of 2D Laser Scans For Indoor Environment
May 27, 2021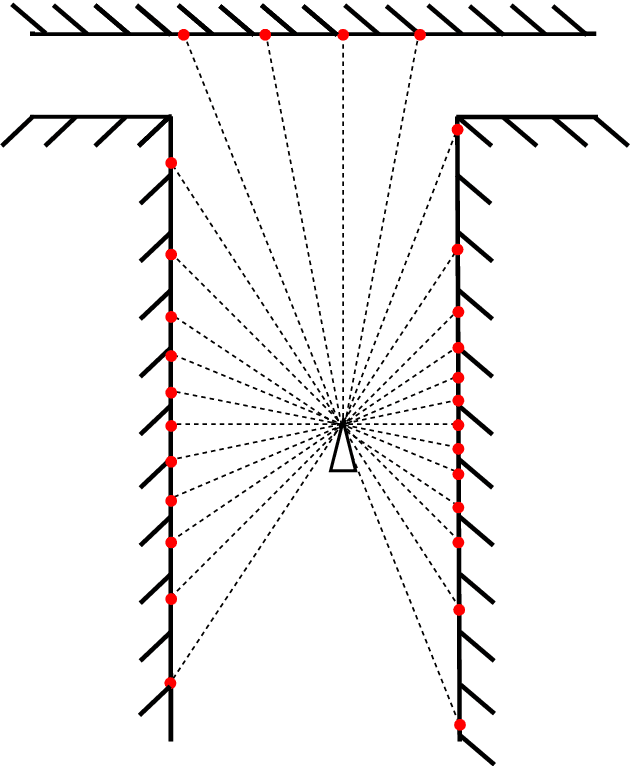
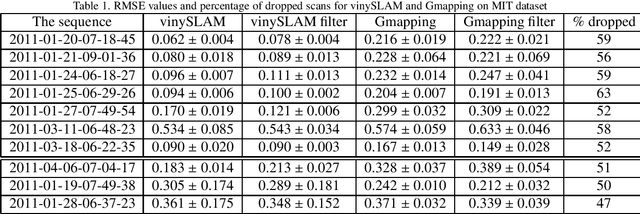
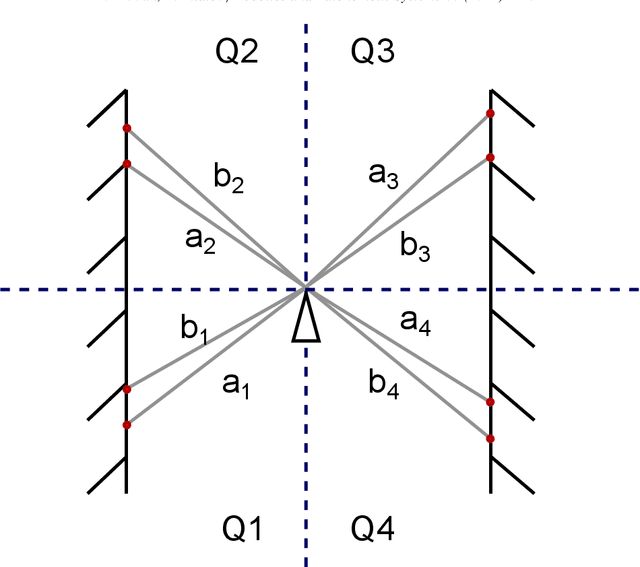
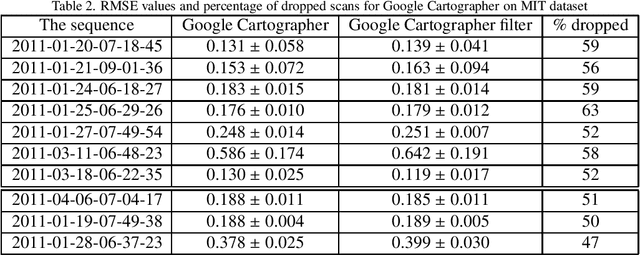
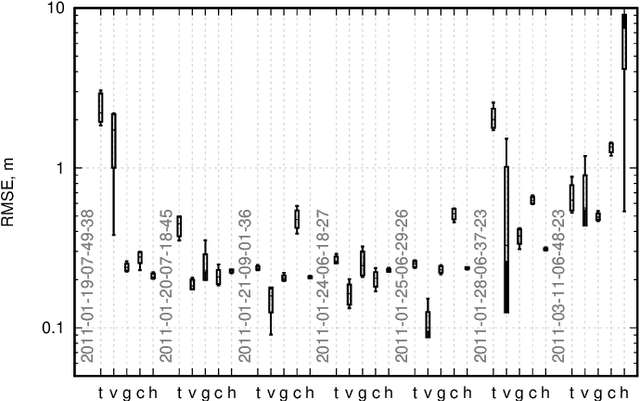
Modern laser SLAM (simultaneous localization and mapping) and structure from motion algorithms face the problem of processing redundant data. Even if a sensor does not move, it still continues to capture scans that should be processed. This paper presents the novel filter that allows dropping 2D scans that bring no new information to the system. Experiments on MIT and TUM datasets show that it is possible to drop more than half of the scans. Moreover thepaper describes the formulas that enable filter adaptation to a particular robot with known speed and characteristics of lidar. In addition, the indoor corridor detector is introduced that also can be applied to any specific shape of a corridor and sensor.
Imitation Learning Approach for AI Driving Olympics Trained on Real-world and Simulation Data Simultaneously
Jul 07, 2020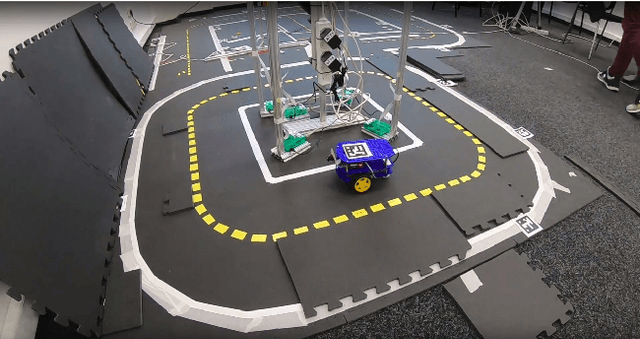
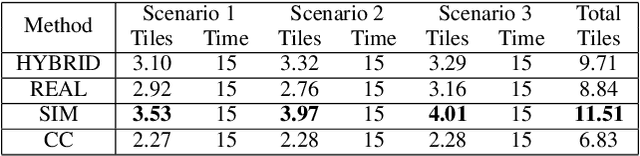
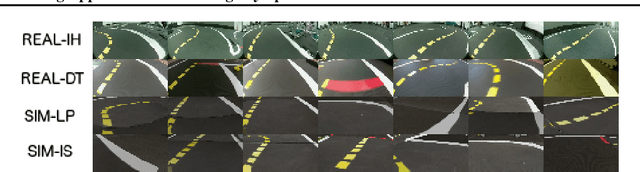
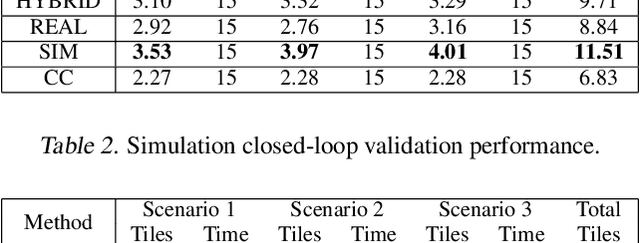
In this paper, we describe our winning approach to solving the Lane Following Challenge at the AI Driving Olympics Competition through imitation learning on a mixed set of simulation and real-world data. AI Driving Olympics is a two-stage competition: at stage one, algorithms compete in a simulated environment with the best ones advancing to a real-world final. One of the main problems that participants encounter during the competition is that algorithms trained for the best performance in simulated environments do not hold up in a real-world environment and vice versa. Classic control algorithms also do not translate well between tasks since most of them have to be tuned to specific driving conditions such as lighting, road type, camera position, etc. To overcome this problem, we employed the imitation learning algorithm and trained it on a dataset collected from sources both from simulation and real-world, forcing our model to perform equally well in all environments.
2D SLAM Quality Evaluation Methods
Aug 08, 2017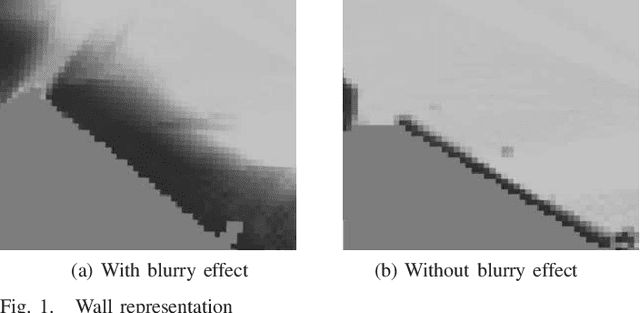

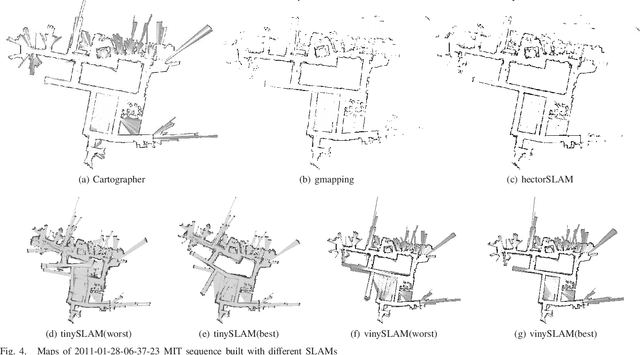
SLAM (Simultaneous Localization and mapping) is one of the most challenging problems for mobile platforms and there is a huge amount of modern SLAM algorithms. The choice of the algorithm that might be used in every particular problem requires prior knowledge about advantages and disadvantages of each algorithm. This paper presents the approach for comparison of SLAM algorithms that allows to find the most accurate one. The accent of research is made on 2D SLAM algorithms and the focus of analysis is 2D map that is built after algorithm performance. Three metrics for evaluation of maps are presented in this paper