 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCorrelation Filter of 2D Laser Scans For Indoor Environment
May 27, 2021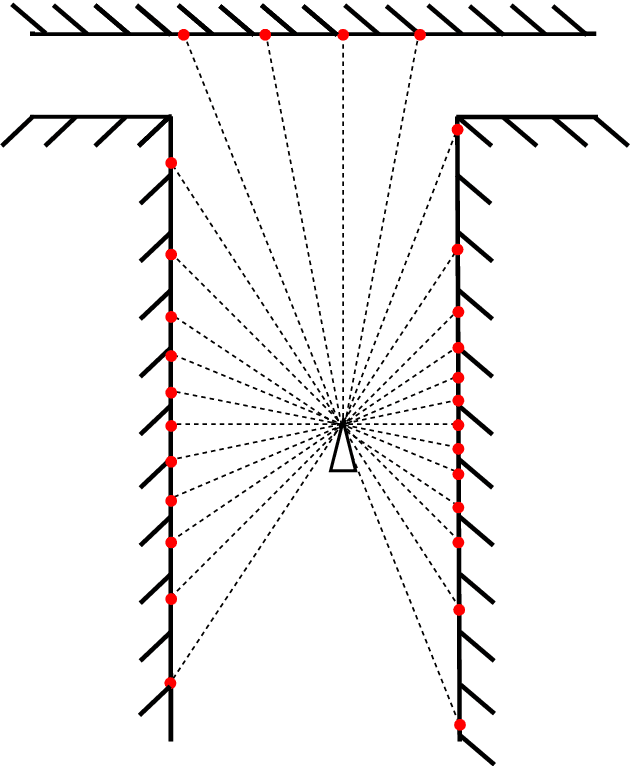
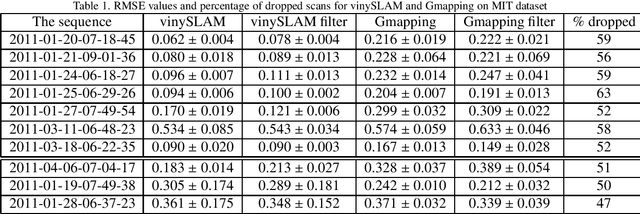
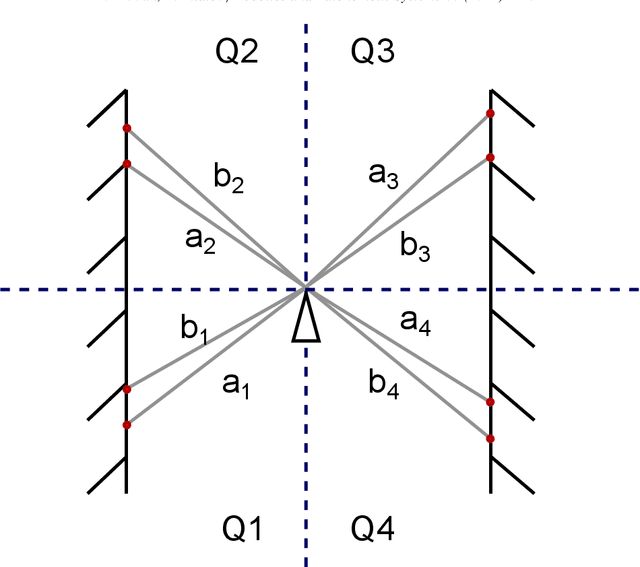
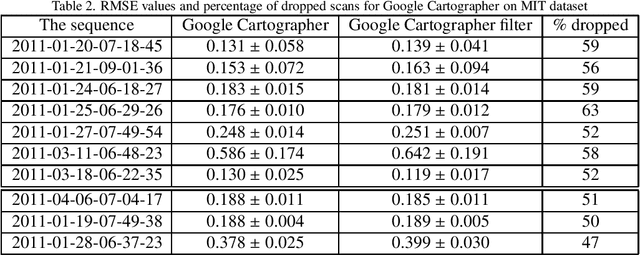
Modern laser SLAM (simultaneous localization and mapping) and structure from motion algorithms face the problem of processing redundant data. Even if a sensor does not move, it still continues to capture scans that should be processed. This paper presents the novel filter that allows dropping 2D scans that bring no new information to the system. Experiments on MIT and TUM datasets show that it is possible to drop more than half of the scans. Moreover thepaper describes the formulas that enable filter adaptation to a particular robot with known speed and characteristics of lidar. In addition, the indoor corridor detector is introduced that also can be applied to any specific shape of a corridor and sensor.
2D SLAM Quality Evaluation Methods
Aug 08, 2017

SLAM (Simultaneous Localization and mapping) is one of the most challenging problems for mobile platforms and there is a huge amount of modern SLAM algorithms. The choice of the algorithm that might be used in every particular problem requires prior knowledge about advantages and disadvantages of each algorithm. This paper presents the approach for comparison of SLAM algorithms that allows to find the most accurate one. The accent of research is made on 2D SLAM algorithms and the focus of analysis is 2D map that is built after algorithm performance. Three metrics for evaluation of maps are presented in this paper