 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEVOLIN Benchmark: Evaluation of Line Detection and Association
Mar 09, 2023



Lines are interesting geometrical features commonly seen in indoor and urban environments. There is missing a complete benchmark where one can evaluate lines from a sequential stream of images in all its stages: Line detection, Line Association and Pose error. To do so, we present a complete and exhaustive benchmark for visual lines in a SLAM front-end, both for RGB and RGBD, by providing a plethora of complementary metrics. We have also labelled data from well-known SLAM datasets in order to have all in one poses and accurately annotated lines. In particular, we have evaluated 17 line detection algorithms, 5 line associations methods and the resultant pose error for aligning a pair of frames with several combinations of detector-association. We have packaged all methods and evaluations metrics and made them publicly available on web-page https://prime-slam.github.io/evolin/.
Combining Thesaurus Knowledge and Probabilistic Topic Models
Jul 31, 2017
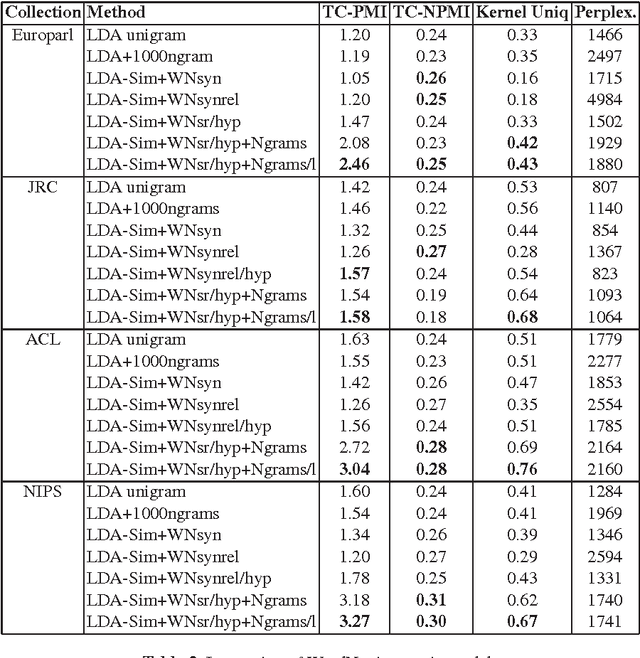
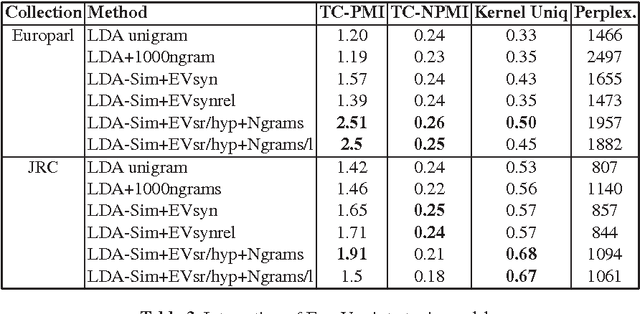

In this paper we present the approach of introducing thesaurus knowledge into probabilistic topic models. The main idea of the approach is based on the assumption that the frequencies of semantically related words and phrases, which are met in the same texts, should be enhanced: this action leads to their larger contribution into topics found in these texts. We have conducted experiments with several thesauri and found that for improving topic models, it is useful to utilize domain-specific knowledge. If a general thesaurus, such as WordNet, is used, the thesaurus-based improvement of topic models can be achieved with excluding hyponymy relations in combined topic models.