 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSecure Communication of UAV-mounted STAR-RIS under Phase Shift Errors
Jul 08, 2025


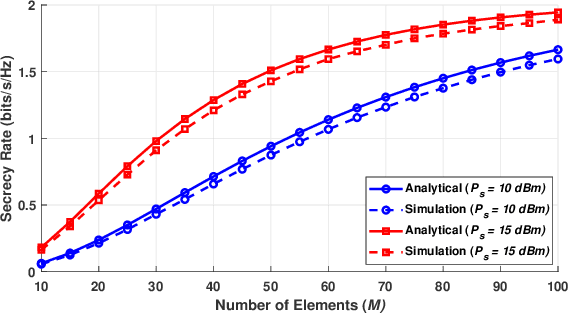
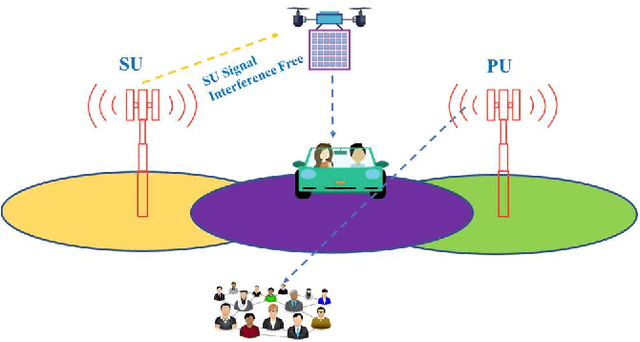
This paper investigates the secure communication capabilities of a non-orthogonal multiple access (NOMA) network supported by a STAR-RIS (simultaneously transmitting and reflecting reconfigurable intelligent surface) deployed on an unmanned aerial vehicle (UAV), in the presence of passive eavesdroppers. The STAR-RIS facilitates concurrent signal reflection and transmission, allowing multiple legitimate users-grouped via NOMA-to be served efficiently, thereby improving spectral utilization. Each user contends with an associated eavesdropper, creating a stringent security scenario. Under Nakagami fading conditions and accounting for phase shift inaccuracies in the STAR-RIS, closed-form expressions for the ergodic secrecy rates of users in both transmission and reflection paths are derived. An optimization framework is then developed to jointly adjust the UAV's positioning and the STAR-RIS power splitting coefficient, aiming to maximize the system's secrecy rate. The proposed approach enhances secure transmission in STAR-RIS-NOMA configurations under realistic hardware constraints and offers valuable guidance for the design of future 6G wireless networks.
A Multi-layer Non-Terrestrial Networks Architecture for 6G and Beyond under Realistic Conditions and with Practical Limitations
Feb 22, 2025In order to bolster the next generation of wireless networks, there has been a great deal of interest in non-terrestrial networks (NTN), including satellites, high altitude platform stations (HAPS), and uncrewed aerial vehicles (UAV). To unlock their full potential, these platforms can integrate advanced technologies such as reconfigurable intelligent surfaces~(RIS) and next-generation multiple access (NGMA). However, in practical applications, transceivers often suffer from radio frequency (RF) impairments, which limit system performance. In this regard, this paper explores the potential of multi-layer NTN architecture to mitigate path propagation loss and improve network performance under hardware impairment limitations. First, we present current research activities in the NTN framework, including RIS, multiple access technologies, and hardware impairments. Next, we introduce a multi-layer NTN architecture with hardware limitations. This architecture includes HAPS super-macro base stations (HAPS-SMBS), UAVs--equipped with passive or active transmissive RIS--, and NGMA techniques, like non-orthogonal multiple access (NOMA), as the multiple access techniques to serve terrestrial devices. Additionally, we present and discuss potential use cases of the proposed multi-layer architecture considering hardware impairments. The multi-layer NTN architecture combined with advanced technologies, such as RIS and NGMA, demonstrates promising results; however, the performance degradation is attributed to RF impairments. Finally, we identify future research directions, including RF impairment mitigation, UAV power management, and antenna designs.
Error Performance Analysis of UAV-Mounted RIS for NOMA Systems with Practical Constraints
May 26, 2024Uncrewed aerial vehicles (UAVs) have attracted recent attention for sixth-generation (6G) networks due to their low cost and flexible deployment. In order to maximize the ever-increasing data rates, spectral efficiency, and wider coverage, technologies such as reconfigurable intelligent surface (RIS) and non-orthogonal multiple access (NOMA) are adapted with UAVs (UAV-RIS NOMA). However, the error performance of UAV-RIS NOMA has not been considered, yet. In this letter, we investigate the error probability of UAV-RIS NOMA systems. We also consider the practical constraints of hardware impairments (HWI) at the transceivers, inter-cell interference (ICI), and imperfect successive interference cancellation (SIC). The analytical derivations are validated by Monte-Carlo simulations. Our results demonstrate that our proposed system achieves higher performance gain (more than 5 dB with increasing the number of RIS elements) with less error probability compared to UAVs without RIS. Moreover, it is found that the HWI, ICI, and imperfect SIC have shown a negative impact on the system performance.
Enhancing Congestion Control to Improve User Experience in IoT Using LSTM Network
Sep 19, 2023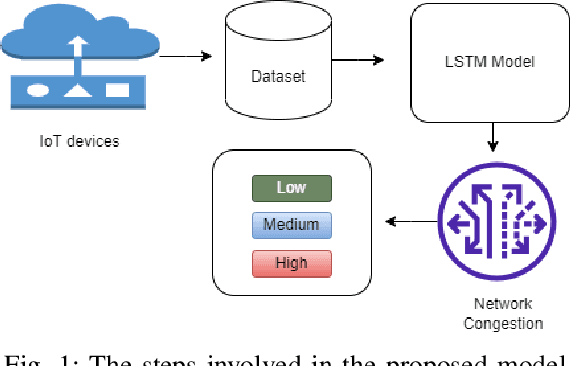
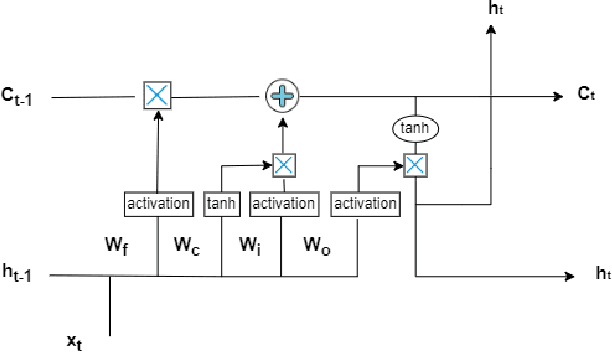
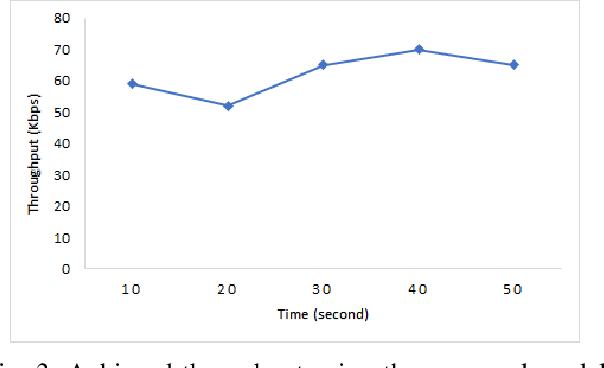
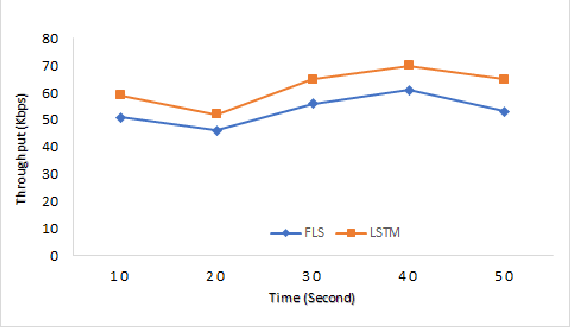
This study suggests a new strategy for improving congestion control by deploying Long Short-Term Memory (LSTM) networks. LSTMs are recurrent neural networks (RNN), that excel at capturing temporal relationships and patterns in data. IoT-specific data such as network traffic patterns, device interactions, and congestion occurrences are gathered and analyzed. The gathered data is used to create and train an LSTM network architecture specific to the IoT environment. Then, the LSTM model's predictive skills are incorporated into the congestion control methods. This work intends to optimize congestion management methods using LSTM networks, which results in increased user satisfaction and dependable IoT connectivity. Utilizing metrics like throughput, latency, packet loss, and user satisfaction, the success of the suggested strategy is evaluated. Evaluation of performance includes rigorous testing and comparison to conventional congestion control methods.
Indoor Positioning using Wi-Fi and Machine Learning for Industry 5.0
Mar 26, 2023


Humans and robots working together in an environment to enhance human performance is the aim of Industry 5.0. Although significant progress in outdoor positioning has been seen, indoor positioning remains a challenge. In this paper, we introduce a new research concept by exploiting the potential of indoor positioning for Industry 5.0. We use Wi-Fi Received Signal Strength Indicator (RSSI) with trilateration using cheap and easily available ESP32 Arduino boards for positioning as well as sending effective route signals to a human and a robot working in a simulated-indoor factory environment in real-time. We utilized machine learning models to detect safe closeness between two co-workers (a human subject and a robot). Experimental data and analysis show an average deviation of less than 1m from the actual distance while the targets are mobile or stationary.
Towards Quantum Annealing for Multi-user NOMA-based Networks
Jan 10, 2023



Quantum Annealing (QA) uses quantum fluctuations to search for a global minimum of an optimization-type problem faster than classical computers. To meet the demand for future internet traffic and mitigate the spectrum scarcity, this work presents the QA-aided maximum likelihood (ML) decoder for multi-user non-orthogonal multiple access (NOMA) networks as an alternative to the successive interference cancellation (SIC) method. The practical system parameters such as channel randomness and possible transmit power levels are taken into account for all individual signals of all involved users. The brute force (BF) and SIC signal detection methods are taken as benchmarks in the analysis. The QA-assisted ML decoder results in the same BER performance as the BF method outperforming the SIC technique, but the execution of QA takes more time than BF and SIC. The parallelization technique can be a potential aid to fasten the execution process. This will pave the way to fully realize the potential of QA decoders in NOMA systems.
On the Performance of Dual RIS-assisted V2I Communication under Nakagami-m Fading
Jan 10, 2023



Vehicle-to-everything (V2X) connectivity in 5G-and-beyond communication networks supports the futuristic intelligent transportation system (ITS) by allowing vehicles to intelligently connect with everything. The advent of reconfigurable intelligent surfaces (RISs) has led to realizing the true potential of V2X communication. In this work, we propose a dual RIS-based vehicle-to-infrastructure (V2I) communication scheme. Following that, the performance of the proposed communication scheme is evaluated in terms of deriving the closed-form expressions for outage probability, spectral efficiency and energy efficiency. Finally, the analytical findings are corroborated with simulations which illustrate the superiority of the RIS-assisted vehicular networks.
IRS-aided UAV for Future Wireless Communications: A Survey and Research Opportunities
Dec 12, 2022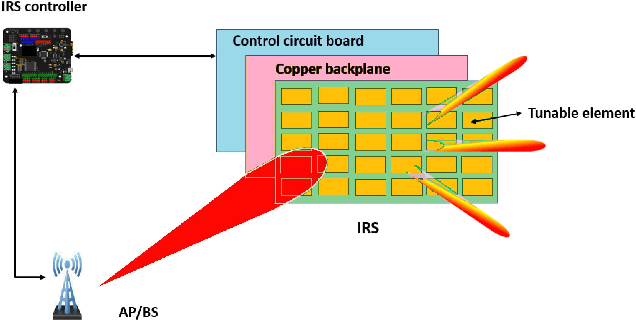
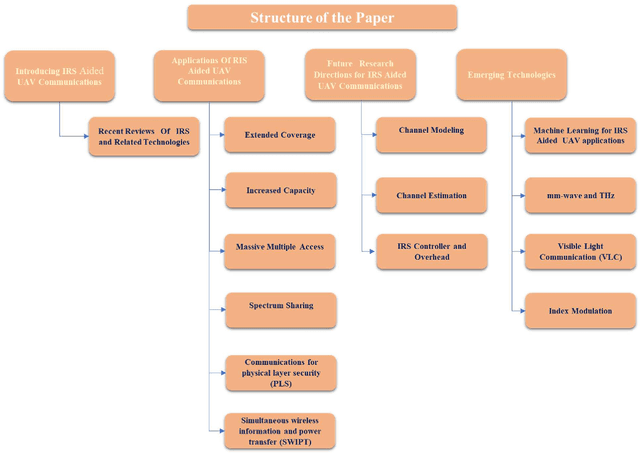
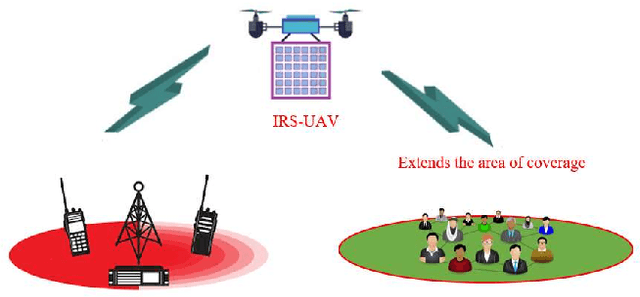
Both unmanned aerial vehicles (UAVs) and intelligent reflecting surfaces (IRS) are gaining traction as transformative technologies for upcoming wireless networks. The IRS-aided UAV communication, which introduces IRSs into UAV communications, has emerged in an effort to improve the system performance while also overcoming UAV communication constraints and issues. The purpose of this paper is to provide a comprehensive overview of IRSassisted UAV communications. First, we provide five examples of how IRSs and UAVs can be combined to achieve unrivaled potential in difficult situations. The technological features of the most recent relevant researches on IRS-aided UAV communications from the perspective of the main performance criteria, i.e., energy efficiency, security, spectral efficiency, etc. Additionally, previous research studies on technology adoption as machine learning algorithms. Lastly, some promising research directions and open challenges for IRS-aided UAV communication are presented.
Error Analysis of Cooperative NOMA with Practical Constraints: Hardware-Impairment, Imperfect SIC and CSI
Jul 01, 2022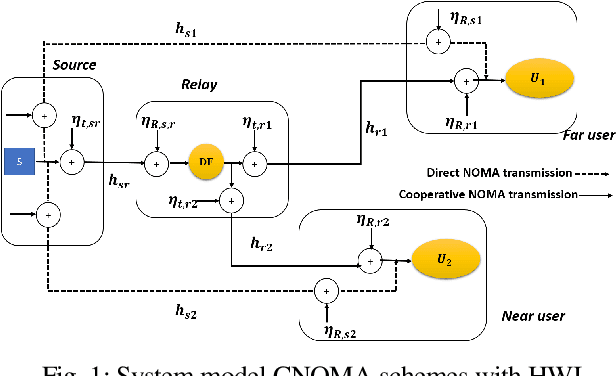

Non-orthogonal multiple access (NOMA) has been a strong candidate to support massive connectivity in future wireless networks. In this regard, its implementation into cooperative relaying, named cooperative-NOMA (CNOMA), has received tremendous attention by researchers. However, most of the existing CNOMA studies have failed to address practical constraints since they assume ideal conditions. Particularly, error performance of CNOMA schemes with imperfections has not been investigated, yet. In this letter, we provide an analytical framework for error performance of CNOMA schemes under practical assumptions where we take into account imperfect successive interference canceler (SIC), imperfect channel estimation (ICSI), and hardware impairments (HWI) at the transceivers. We derive bit error rate (BER) expressions in CNOMA schemes whether the direct links between source and users exist or not which is, to the best of the authors' knowledge, the first study in the open literature. For comparisons, we also provide BER expression for downlink NOMA with practical constraints which has also not been given in literature, yet. The theoretical BER expressions are validated with computer simulations where the perfect-match is observed. Finally, we discuss the effects of the system parameters (e.g., power allocation, HWI level) on the performance of CNOMA schemes to reveal fruitful insights for the society.
A Hybrid Energy Harvesting Protocol for Cooperative NOMA: Error Performance Approach
Jul 01, 2022



Cooperative non-orthogonal multiple access (CNOMA) has recently been adapted with energy harvesting (EH) to increase energy efficiency and extend the lifetime of energy-constrained wireless networks. This paper proposes a hybrid EH protocol-assisted CNOMA, which is a combination of the two main existing EH protocols (power splitting (PS) and time switching (TS)). The end-to-end bit error rate (BER) expressions of users in the proposed scheme are obtained over Nakagami-$m$ fading channels. The proposed hybrid EH (HEH) protocol is compared with the benchmark schemes (i.e., existing EH protocols and no EH). Based on the extensive simulations, we reveal that the analytical results match perfectly with simulations which proves the correctness of the derivations. Numerical results also show that the HEH-CNOMA outperforms the benchmarks significantly. In addition, we discuss the optimum value of EH factors to minimize the error probability in HEH-CNOMA and show that an optimum value can be obtained according to channel parameters.