 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBayesian optimization of distributed neurodynamical controller models for spatial navigation
Oct 31, 2021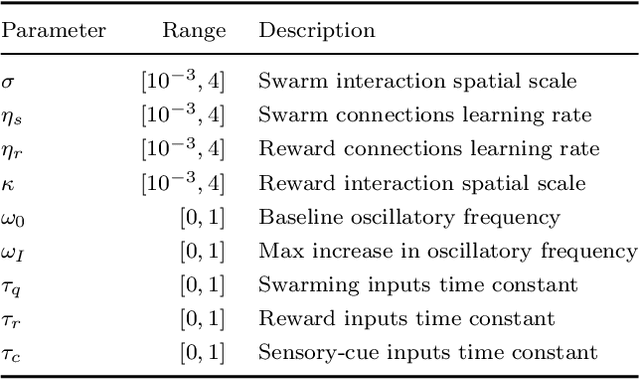

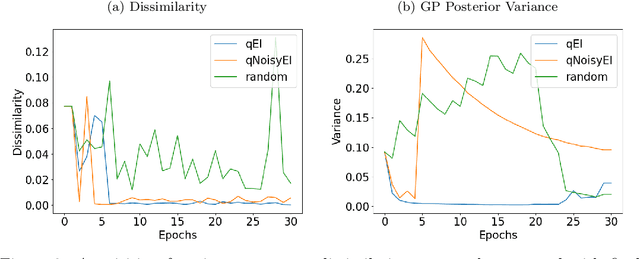
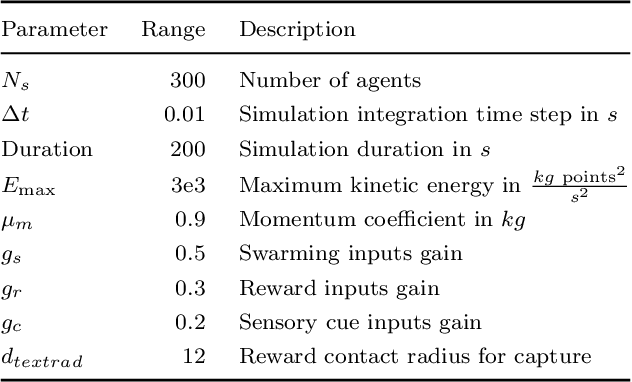
Dynamical systems models for controlling multi-agent swarms have demonstrated advances toward resilient, decentralized navigation algorithms. We previously introduced the NeuroSwarms controller, in which agent-based interactions were modeled by analogy to neuronal network interactions, including attractor dynamics and phase synchrony, that have been theorized to operate within hippocampal place-cell circuits in navigating rodents. This complexity precludes linear analyses of stability, controllability, and performance typically used to study conventional swarm models. Further, tuning dynamical controllers by hand or grid search is often inadequate due to the complexity of objectives, dimensionality of model parameters, and computational costs of simulation-based sampling. Here, we present a framework for tuning dynamical controller models of autonomous multi-agent systems based on Bayesian Optimization (BayesOpt). Our approach utilizes a task-dependent objective function to train Gaussian Processes (GPs) as surrogate models to achieve adaptive and efficient exploration of a dynamical controller model's parameter space. We demonstrate this approach by studying an objective function selecting for NeuroSwarms behaviors that cooperatively localize and capture spatially distributed rewards under time pressure. We generalized task performance across environments by combining scores for simulations in distinct geometries. To validate search performance, we compared high-dimensional clustering for high- vs. low-likelihood parameter points by visualizing sample trajectories in Uniform Manifold Approximation and Projection (UMAP) embeddings. Our findings show that adaptive, sample-efficient evaluation of the self-organizing behavioral capacities of complex systems, including dynamical swarm controllers, can accelerate the translation of neuroscientific theory to applied domains.
Cognitive swarming in complex environments with attractor dynamics and oscillatory computing
Sep 15, 2019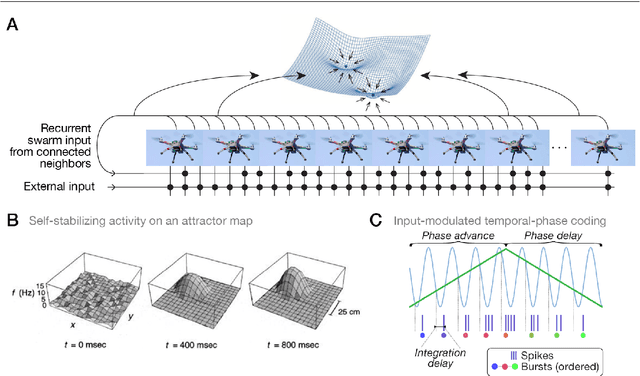



Neurobiological theories of spatial cognition developed with respect to recording data from relatively small and/or simplistic environments compared to animals' natural habitats. It has been unclear how to extend theoretical models to large or complex spaces. Complementarily, in autonomous systems technology, applications have been growing for distributed control methods that scale to large numbers of low-footprint mobile platforms. Animals and many-robot groups must solve common problems of navigating complex and uncertain environments. Here, we introduce the 'NeuroSwarms' control framework to investigate whether adaptive, autonomous swarm control of minimal artificial agents can be achieved by direct analogy to neural circuits of rodent spatial cognition. NeuroSwarms analogizes agents to neurons and swarming groups to recurrent networks. We implemented neuron-like agent interactions in which mutually visible agents operate as if they were reciprocally-connected place cells in an attractor network. We attributed a phase state to agents to enable patterns of oscillatory synchronization similar to hippocampal models of theta-rhythmic (5-12 Hz) sequence generation. We demonstrate that multi-agent swarming and reward-approach dynamics can be expressed as a mobile form of Hebbian learning and that NeuroSwarms supports a single-entity paradigm that directly informs theoretical models of animal cognition. We present emergent behaviors including phase-organized rings and trajectory sequences that interact with environmental cues and geometry in large, fragmented mazes. Thus, NeuroSwarms is a model artificial spatial system that integrates autonomous control and theoretical neuroscience to potentially uncover common principles to advance both domains.
Information-Theoretic Bounds and Approximations in Neural Population Coding
Nov 07, 2017While Shannon's mutual information has widespread applications in many disciplines, for practical applications it is often difficult to calculate its value accurately for high-dimensional variables because of the curse of dimensionality. This paper is focused on effective approximation methods for evaluating mutual information in the context of neural population coding. For large but finite neural populations, we derive several information-theoretic asymptotic bounds and approximation formulas that remain valid in high-dimensional spaces. We prove that optimizing the population density distribution based on these approximation formulas is a convex optimization problem which allows efficient numerical solutions. Numerical simulation results confirmed that our asymptotic formulas were highly accurate for approximating mutual information for large neural populations. In special cases, the approximation formulas are exactly equal to the true mutual information. We also discuss techniques of variable transformation and dimensionality reduction to facilitate computation of the approximations.
An Information-Theoretic Framework for Fast and Robust Unsupervised Learning via Neural Population Infomax
Mar 10, 2017

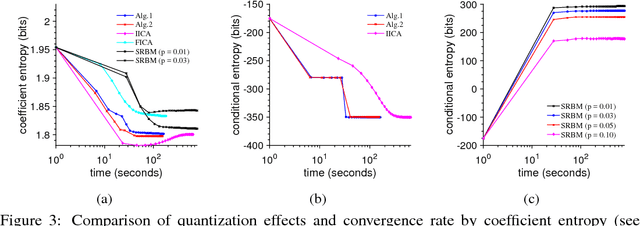
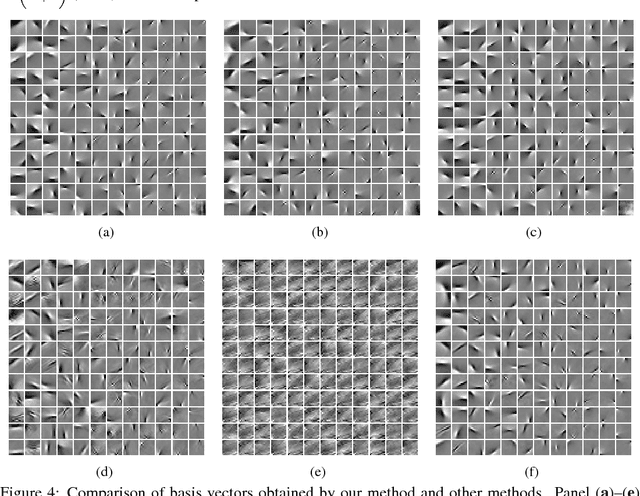
A framework is presented for unsupervised learning of representations based on infomax principle for large-scale neural populations. We use an asymptotic approximation to the Shannon's mutual information for a large neural population to demonstrate that a good initial approximation to the global information-theoretic optimum can be obtained by a hierarchical infomax method. Starting from the initial solution, an efficient algorithm based on gradient descent of the final objective function is proposed to learn representations from the input datasets, and the method works for complete, overcomplete, and undercomplete bases. As confirmed by numerical experiments, our method is robust and highly efficient for extracting salient features from input datasets. Compared with the main existing methods, our algorithm has a distinct advantage in both the training speed and the robustness of unsupervised representation learning. Furthermore, the proposed method is easily extended to the supervised or unsupervised model for training deep structure networks.
Information-theoretic interpretation of tuning curves for multiple motion directions
Feb 01, 2017



We have developed an efficient information-maximization method for computing the optimal shapes of tuning curves of sensory neurons by optimizing the parameters of the underlying feedforward network model. When applied to the problem of population coding of visual motion with multiple directions, our method yields several types of tuning curves with both symmetric and asymmetric shapes that resemble what have been found in the visual cortex. Our result suggests that the diversity or heterogeneity of tuning curve shapes as observed in neurophysiological experiment might actually constitute an optimal population representation of visual motions with multiple components.