 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBayesian optimization of distributed neurodynamical controller models for spatial navigation
Paper and Code
Oct 31, 2021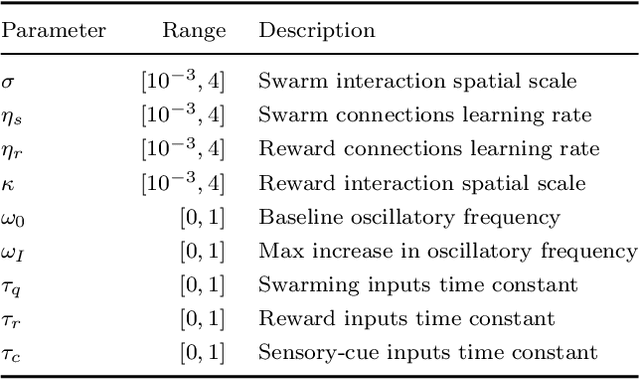

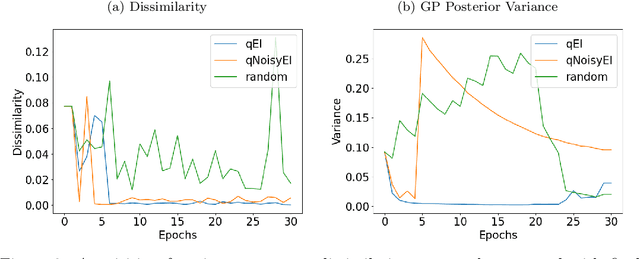
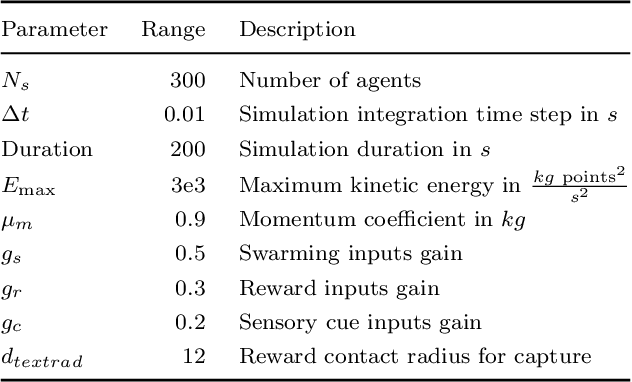
Dynamical systems models for controlling multi-agent swarms have demonstrated advances toward resilient, decentralized navigation algorithms. We previously introduced the NeuroSwarms controller, in which agent-based interactions were modeled by analogy to neuronal network interactions, including attractor dynamics and phase synchrony, that have been theorized to operate within hippocampal place-cell circuits in navigating rodents. This complexity precludes linear analyses of stability, controllability, and performance typically used to study conventional swarm models. Further, tuning dynamical controllers by hand or grid search is often inadequate due to the complexity of objectives, dimensionality of model parameters, and computational costs of simulation-based sampling. Here, we present a framework for tuning dynamical controller models of autonomous multi-agent systems based on Bayesian Optimization (BayesOpt). Our approach utilizes a task-dependent objective function to train Gaussian Processes (GPs) as surrogate models to achieve adaptive and efficient exploration of a dynamical controller model's parameter space. We demonstrate this approach by studying an objective function selecting for NeuroSwarms behaviors that cooperatively localize and capture spatially distributed rewards under time pressure. We generalized task performance across environments by combining scores for simulations in distinct geometries. To validate search performance, we compared high-dimensional clustering for high- vs. low-likelihood parameter points by visualizing sample trajectories in Uniform Manifold Approximation and Projection (UMAP) embeddings. Our findings show that adaptive, sample-efficient evaluation of the self-organizing behavioral capacities of complex systems, including dynamical swarm controllers, can accelerate the translation of neuroscientific theory to applied domains.