 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePrAda-GAN: A Private Adaptive Generative Adversarial Network with Bayes Network Structure
Nov 11, 2025We revisit the problem of generating synthetic data under differential privacy. To address the core limitations of marginal-based methods, we propose the Private Adaptive Generative Adversarial Network with Bayes Network Structure (PrAda-GAN), which integrates the strengths of both GAN-based and marginal-based approaches. Our method adopts a sequential generator architecture to capture complex dependencies among variables, while adaptively regularizing the learned structure to promote sparsity in the underlying Bayes network. Theoretically, we establish diminishing bounds on the parameter distance, variable selection error, and Wasserstein distance. Our analysis shows that leveraging dependency sparsity leads to significant improvements in convergence rates. Empirically, experiments on both synthetic and real-world datasets demonstrate that PrAda-GAN outperforms existing tabular data synthesis methods in terms of the privacy-utility trade-off.
An Efficient Deep Template Matching and In-Plane Pose Estimation Method via Template-Aware Dynamic Convolution
Oct 02, 2025



In industrial inspection and component alignment tasks, template matching requires efficient estimation of a target's position and geometric state (rotation and scaling) under complex backgrounds to support precise downstream operations. Traditional methods rely on exhaustive enumeration of angles and scales, leading to low efficiency under compound transformations. Meanwhile, most deep learning-based approaches only estimate similarity scores without explicitly modeling geometric pose, making them inadequate for real-world deployment. To overcome these limitations, we propose a lightweight end-to-end framework that reformulates template matching as joint localization and geometric regression, outputting the center coordinates, rotation angle, and independent horizontal and vertical scales. A Template-Aware Dynamic Convolution Module (TDCM) dynamically injects template features at inference to guide generalizable matching. The compact network integrates depthwise separable convolutions and pixel shuffle for efficient matching. To enable geometric-annotation-free training, we introduce a rotation-shear-based augmentation strategy with structure-aware pseudo labels. A lightweight refinement module further improves angle and scale precision via local optimization. Experiments show our 3.07M model achieves high precision and 14ms inference under compound transformations. It also demonstrates strong robustness in small-template and multi-object scenarios, making it highly suitable for deployment in real-time industrial applications. The code is available at:https://github.com/ZhouJ6610/PoseMatch-TDCM.
* Published in Expert Systems with Applications
Better Locally Private Sparse Estimation Given Multiple Samples Per User
Aug 08, 2024



Previous studies yielded discouraging results for item-level locally differentially private linear regression with $s^*$-sparsity assumption, where the minimax rate for $nm$ samples is $\mathcal{O}(s^{*}d / nm\varepsilon^2)$. This can be challenging for high-dimensional data, where the dimension $d$ is extremely large. In this work, we investigate user-level locally differentially private sparse linear regression. We show that with $n$ users each contributing $m$ samples, the linear dependency of dimension $d$ can be eliminated, yielding an error upper bound of $\mathcal{O}(s^{*2} / nm\varepsilon^2)$. We propose a framework that first selects candidate variables and then conducts estimation in the narrowed low-dimensional space, which is extendable to general sparse estimation problems with tight error bounds. Experiments on both synthetic and real datasets demonstrate the superiority of the proposed methods. Both the theoretical and empirical results suggest that, with the same number of samples, locally private sparse estimation is better conducted when multiple samples per user are available.
Locally Private Estimation with Public Features
May 22, 2024



We initiate the study of locally differentially private (LDP) learning with public features. We define semi-feature LDP, where some features are publicly available while the remaining ones, along with the label, require protection under local differential privacy. Under semi-feature LDP, we demonstrate that the mini-max convergence rate for non-parametric regression is significantly reduced compared to that of classical LDP. Then we propose HistOfTree, an estimator that fully leverages the information contained in both public and private features. Theoretically, HistOfTree reaches the mini-max optimal convergence rate. Empirically, HistOfTree achieves superior performance on both synthetic and real data. We also explore scenarios where users have the flexibility to select features for protection manually. In such cases, we propose an estimator and a data-driven parameter tuning strategy, leading to analogous theoretical and empirical results.
Road Segmentation with Image-LiDAR Data Fusion
May 26, 2019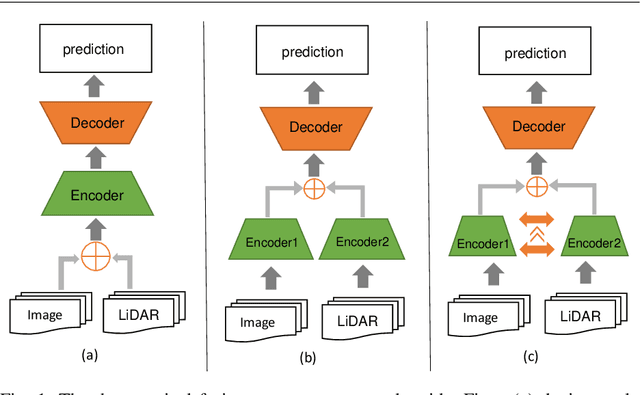
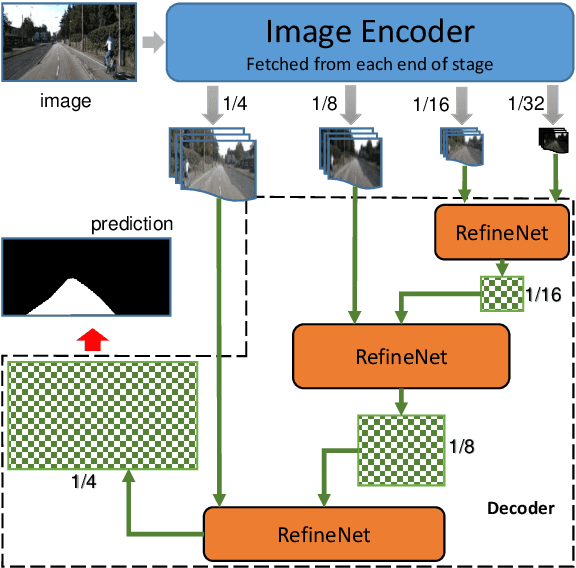
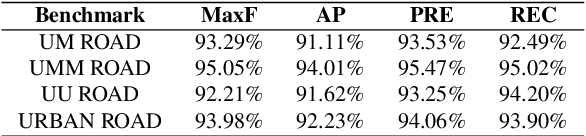
Robust road segmentation is a key challenge in self-driving research. Though many image-based methods have been studied and high performances in dataset evaluations have been reported, developing robust and reliable road segmentation is still a major challenge. Data fusion across different sensors to improve the performance of road segmentation is widely considered an important and irreplaceable solution. In this paper, we propose a novel structure to fuse image and LiDAR point cloud in an end-to-end semantic segmentation network, in which the fusion is performed at decoder stage instead of at, more commonly, encoder stage. During fusion, we improve the multi-scale LiDAR map generation to increase the precision of the multi-scale LiDAR map by introducing pyramid projection method. Additionally, we adapted the multi-path refinement network with our fusion strategy and improve the road prediction compared with transpose convolution with skip layers. Our approach has been tested on KITTI ROAD dataset and has competitive performance.